












Покрокові інструкції отримання точних результатів за допомогою дронів DJI Enterprise
Постобробка кінематики (PPK) — це метод використання даних Глобальної навігаційної супутникової системи (GNSS) для точного визначення положення і траєкторії руху дрона. PPK передбачає збір необроблених GNSS-даних із безпілотника разом з інформацією про положення і траєкторію найближчих опорних станцій, а потім обробку даних постфактум для підвищення точності інформації про положення і траєкторію.
PPK зазвичай використовується в таких сферах, як-от геодезія, картографія та точне землеробство, де високоточне позиціонування є критично важливим. На відміну від кінематичного позиціонування в реальному часі (RTK), яке вимагає бездротового з'єднання з опорними станціями в реальному часі, PPK може бути виконано постфактум, що забезпечує більшу гнучкість збору даних.
Постобробка даних GNSS передбачає використання спеціалізованого програмного забезпечення для необроблених даних, зібраних приймачем, і порівняння їх із даними від найближчих опорних станцій для визначення точного місцезнаходження дрона в певний момент часу. Цей процес може підвищити точність інформації про місцезнаходження і траєкторію, виправляючи помилки, внесені такими факторами, як-от атмосферні умови і відхилення орбіти супутника.
Хоча для картографування з дронів можна використовувати як RTK, так і PPK-позиціонування, у використанні PPK перед RTK є деякі переваги:
| Плюси | Мінуси | |
RTK |
Зворотний зв'язок у реальному часі: завдяки RTK зворотний зв'язок у реальному часі доступний під час місії, що може полегшити виявлення та вирішення проблем у міру їх виникнення. | Нижча точність: на точність RTK можуть впливати затримки та переривання зв'язку, що робить його менш точним, ніж PPK. |
| Швидка обробка даних: дані RTK можна швидко обробити та скоротити час виконання робіт для отримання кінцевого продукту. | Залежність від зв'язку: RTK потребує зв'язку з опорною станцією в реальному часі під час місії, що може бути проблематичним у віддалених або сільських районах із обмеженим або відсутнім покриттям стільникового зв'язку за використання RTK через протокол NTRIP. | |
| Зручність для користувача: RTK, як правило, простіший у використанні, ніж PPK, і вимагає менше навичок для налаштування та експлуатації. | Вищі витрати: RTK може бути дорожчим за PPK через потребу в додаткових RTK-модулях або підписці на послуги NTRIP. | |
PPK |
Не потребує зв'язку в реальному часі: RTK вимагає зв'язку в реальному часі між дроном і наземною станцією для отримання даних про поправки від опорної станції. PPK не потребує зв'язку в реальному часі, оскільки дані корекції застосовуються пізніше під час постобробки. | Довший час постобробки: PPK потребує постобробки даних, що може зайняти час і затримати доставку кінцевого продукту. |
| Більша гнучкість: за допомогою PPK дрон може виконувати місію і збирати дані, а постобробка може бути виконана пізніше, що забезпечує більшу гнучкість збору даних, особливо в районах з обмеженим або відсутнім покриттям стільникового зв'язку. | Мінімальна тривалість польоту: Для отримання точних даних позиціонування необхідно зафіксувати достатню кількість точок даних GNSS під час польоту. Це означає, що дрон повинен летіти певний час на певній відстані, щоб зібрати достатню кількість точок даних для обробки PPK. Точна тривалість і відстань польоту залежать від різних факторів, як-от використовуваний GNSS-приймач, якість даних опорної станції та умови польоту. Як правило, рекомендується мінімальна тривалість польоту 10 хвилин, щоб зібрати достатню кількість точок GNSS-даних для точної обробки PPK. Однак це може змінюватися залежно від конкретних вимог картографічного проєкту та якості зібраних GNSS-даних. | |
| Вища точність: хоча і RTK, і PPK можуть забезпечити високу точність, PPK може запропонувати ще вищу точність, оскільки він не схильний до потенційних затримок або перебоїв зв'язку під час збору даних. PPK також може використовувати більше референтних станцій під час постобробки, що може ще більше підвищити точність. | ||
| Зменшення витрат: PPK може бути дешевшим за RTK, оскільки не потребує зв'язку в режимі реального часу, що може вимагати додаткового обладнання та абонентської плати. |
Вибір PPK або RTK для картографічного проєкту залежить від конкретних вимог, включно з гнучкістю, вартістю і масштабом місії. Хоча обидва методи мають свої переваги та недоліки, дрони DJI Enterprise RTK завжди записують дані супутникових спостережень. Це гарантує, що навіть якщо нестабільний стільниковий зв'язок перериває RTK-зв'язок під час польоту, користувач все одно може отримати дані базової станції й використовувати метод PPK як резервну копію для виведення точних даних на сантиметровому рівні.
Підготовка апаратного та програмного забезпечення PPK
|
Апаратне забезпечення БПЛА та корисного навантаження
|
Matrice 300 RTK + Zenmuse P1 |
| Matrice 300 RTK + Zenmuse L1 | |
| Mavic 3 Enterprise + RTK Module | |
| Mavic 3 Multispectral + RTK Module | |
| Phantom 4 RTK | |
| Програмне забезпечення для планування польоту | Застосунок DJI Pilot 2 |
| Джерело навігаційних файлів для незалежного обміну даними з базовим приймачем (RINEX) | DJI D-RTK 2 Base Station |
| Сторонні базові станції | |
| NGS CORS (Online) | |
| Спеціалізоване програмне забезпечення PPK (одна з наданих опцій) | Propeller Aero |
| RTKLIB | |
| REDcatch REDtoolbox | |
| Програмне забезпечення для фотограмметрії | DJI Terra |
| Стороннє програмне забезпечення для фотограмметрії |
Робочий процес
Виконання процесу PPK із даними знімків може здатися складним завданням, але насправді це простий процес після ретельного планування та виконання. Процес складається з кількох стрижневих кроків, які будуть розглянуті більш детально в наведених нижче інструкціях.
- Налаштування та підготовка. Перш ніж почати збирати дані з дрона, необхідно ретельно спланувати місію. Це передбачає забезпечення достатньої тривалості польоту, а також увімкнення деяких налаштувань у додатку DJI Pilot. Ретельно спланувавши місію, ви зможете забезпечити збір достатньої кількості даних для точної обробки PPK.
- Збір даних з дрона. Після того, як Ви спланували місію, настав час зібрати дані зображень із дрона й відповідні GNSS-дані з приймача дрона під час польоту. Дані GNSS повинні включати необроблені дані супутникової навігаційної системи, а також інформацію з мітками часу. Важливо зібрати якомога більше даних, щоб забезпечити точну обробку PPK.
- Збір довідкових даних. На додаток до збору даних з дрона, Вам також потрібно зібрати опорні дані з найближчих референцних станцій GNSS, як-от CORS або інших наземних приймачів. Довідкові дані повинні включати ті ж самі сигнали GNSS та інформацію про час, що й дані GNSS дрона. Збираючи опорні дані, Ви можете гарантувати, що Ваші результати PPK будуть максимально точними.
- Вирівнювання даних і обробка PPK. Після того, як Ви зібрали всі необхідні дані, Вам потрібно узгодити дані зображення з дрона з відповідними даними GNSS на основі інформації про час. Це можна зробити за допомогою спеціалізованого програмного забезпечення, яке може зіставити інформацію про час між зйомкою зображення й точкою даних GNSS. Після вирівнювання даних Ви можете обробити їх за допомогою спеціалізованого програмного забезпечення PPK або онлайн-сервісів. Обробка PPK використовує дані GNSS як із приймача дрона, так і з референцних станцій для обчислення точного позиціонування для кожного зображення, знятого під час польоту.
- Перезапис POS-даних. Переконайтеся, що нові POS-дані правильно імпортовані у фотограмметричне програмне забезпечення. Цей крок є критично важливим, оскільки точність фотограмметричних моделей сильно залежить від якості вхідних даних. Тому необхідно ще раз перевірити сумісність даних POS із програмним забезпеченням і переконатися, що вони правильно перезаписані.
Це необхідний процес для отримання точних результатів картографування. Ретельно спланувавши місію, зібравши достатньо даних і провівши перевірку якості, Ви зможете забезпечити максимально точні результати.
Налаштування й підготовка
Перед польотом дрона важливо правильно налаштувати застосунок DJI Pilot 2. Ось кілька порад для забезпечення успішного польоту:
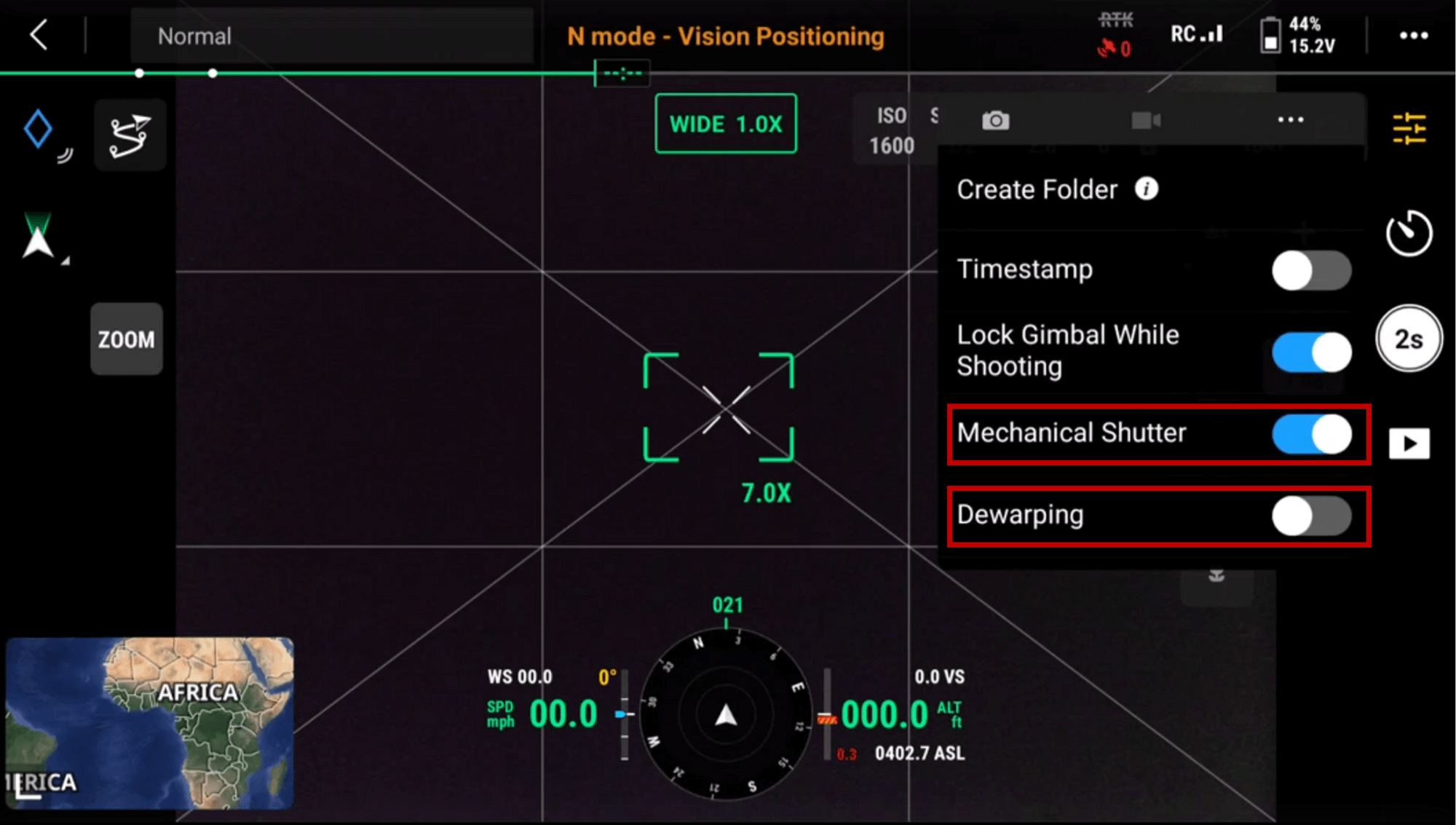
1. Увімкніть опцію Mechanical Shutter (Механічний затвор) і вимкніть опцію Dewarping.
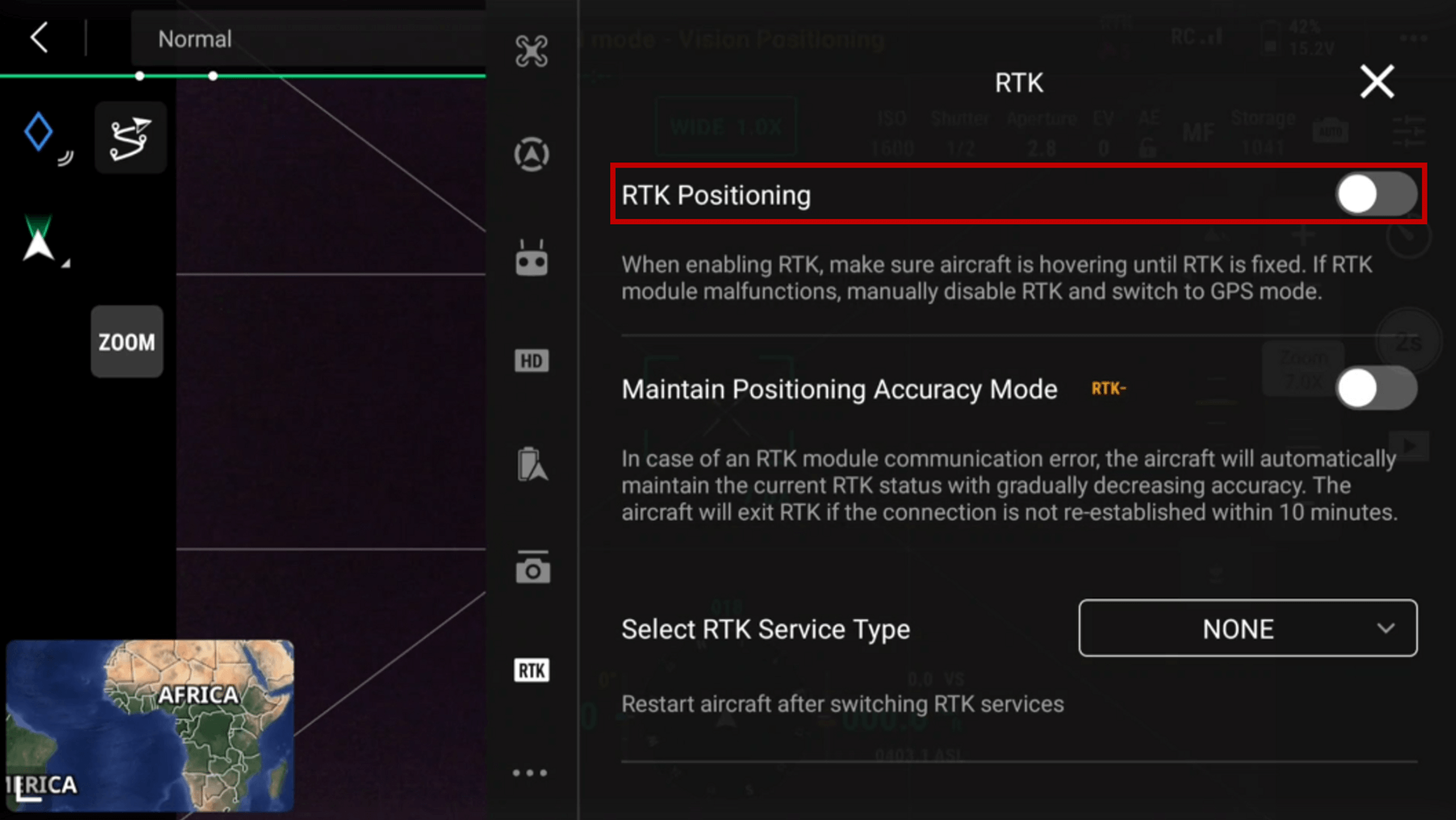
2. Переконайтеся, що опція RTK вимкнена в налаштуваннях застосунку Pilot.
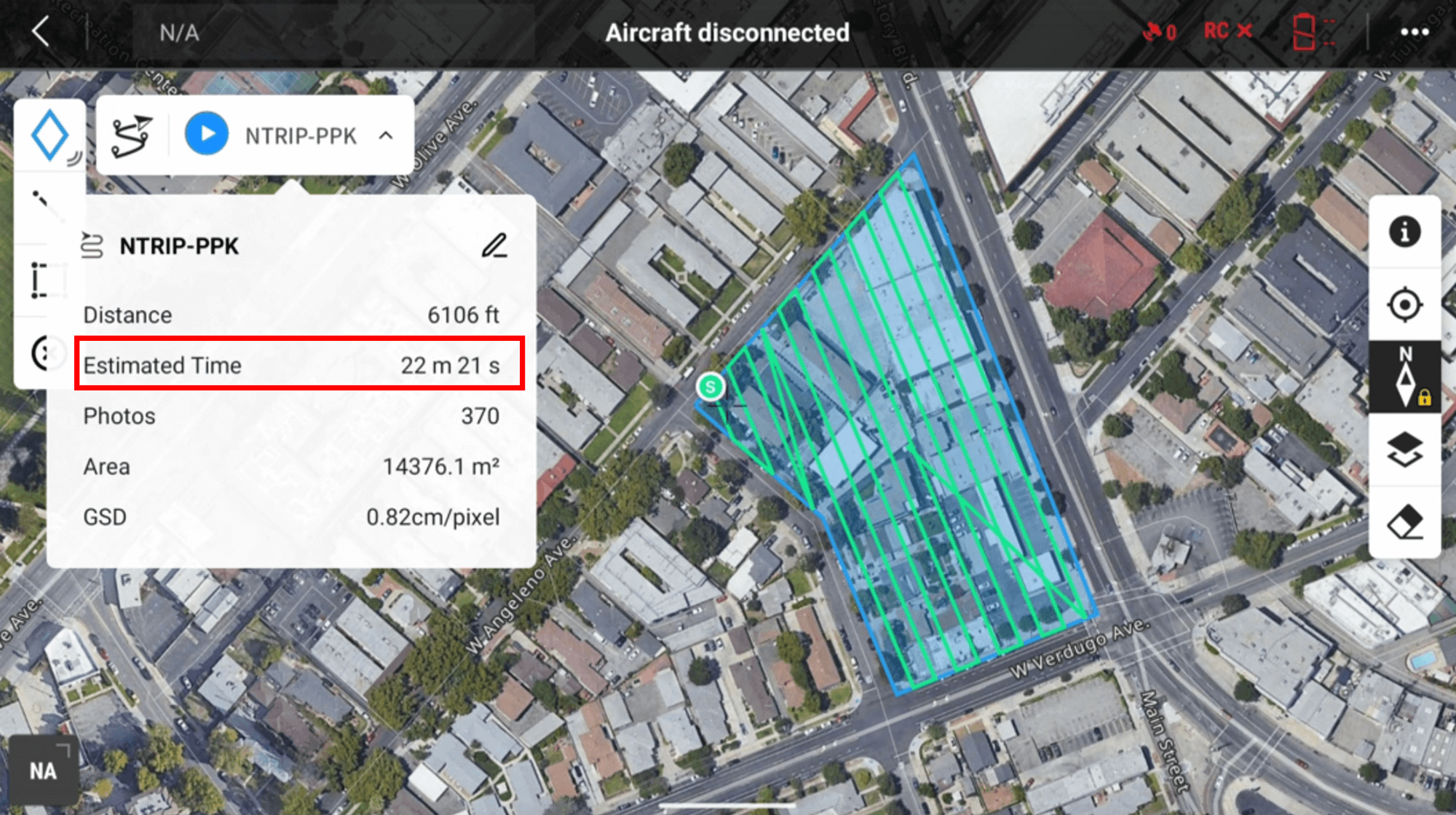
3. Важливо, що процес PPK вимагає постобробки даних. Це може зайняти певний час і затримати отримання кінцевого продукту. Крім того, отримання точних даних позиціонування за допомогою PPK вимагає збору достатньої кількості точок даних GNSS під час польоту. Точна тривалість і необхідна відстань залежать від різних факторів, як-от використовуваний GNSS-приймач, якість даних референцної станції та умови польоту. Як правило, рекомендується літати щонайменше 10 хвилин, щоб зібрати достатню кількість точок GNSS-даних для точної обробки PPK. У Pilot Ви можете перевірити розрахунковий час польоту місії на вкладці overview (Огляд місії), що випадає.
Збір даних із дронів
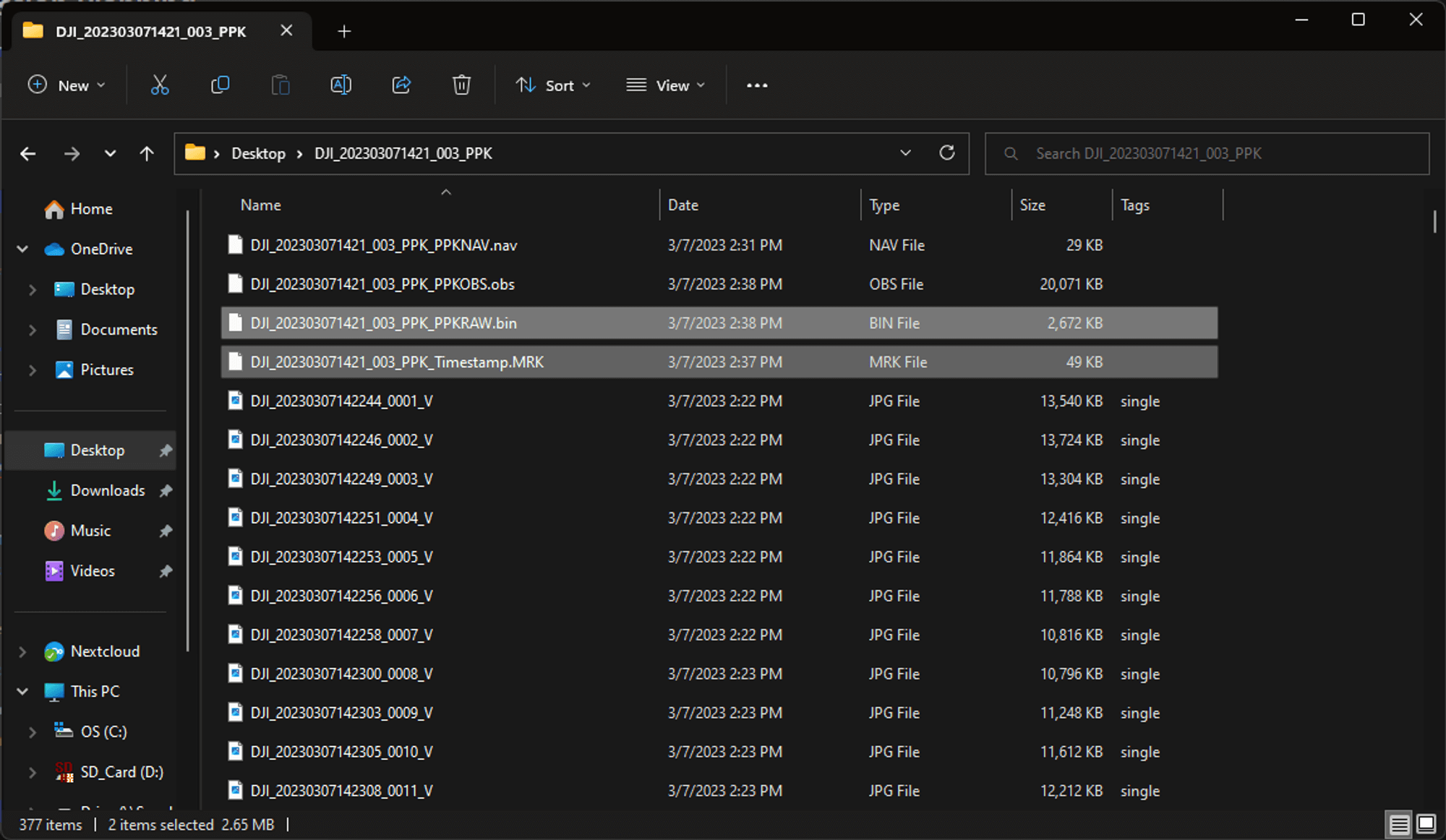
Для належного опрацювання методом PPK необхідні дані з дрона. Крім необроблених зображень, із папки з зображеннями потрібні ще два файли: файл незалежного обміну даними з приймача дрона (RINEX) і файл мітки часу зображення.
Файл RINEX містить необроблені GPS-вимірювання дрона, які є критично важливими для досягнення високої точності позиціонування. Ці дані використовуються для корекції помилок у сигналі GPS, які можуть виникнути через різні фактори, наприклад, атмосферні умови й положення супутників GPS. Без цих даних точність методу PPK була б суттєво знижена. Файл RINEX з назвою "XXX_PPKRAW.bin" знаходиться у папці з необробленими фотографіями.
Аналогічно, файл мітки часу зображення має вирішальне значення для отримання точних результатів. Цей файл записує точний час, коли було зроблено кожне зображення, що необхідно для правильної синхронізації даних зображення з GPS-вимірюваннями. Без цієї інформації точне узгодження даних зображення з даними GPS було б дуже складним, що негативно вплинуло б на точність кінцевих результатів. Файл мітки часу з назвою "XXX_Timestamp.MRK" також можна знайти у папці з необробленими фотографіями.
Важливо переконатися, що ці файли правильно зібрані та оброблені, щоб досягти максимально можливої точності за допомогою методу PPK. І лише деякі моделі дронів DJI Enterprise з підтримкою RTK/PPK здатні виводити ці файли:
- DJI M300 RTK (тільки з корисним навантаженням Zenmuse P1 або Zenmuse L1)
- DJI Mavic 3 Enterprise (тільки з підключеним модулем RTK)
- DJI Mavic 3 Multispectral (тільки з підключеним модулем RTK)
- DJI Phantom 4 RTK
Збір вихідних даних
Для виконання посткінематичної обробки PPK (Post-Processed Kinematic) з використанням базової станції для збору опорних даних, як правило, потрібні два типи файлів, пов'язаних із даними GNSS (Global Navigation Satellite System), базовий файл RINEX і навігаційний файл:
- Базовий файл RINEX: цей файл містить необроблені GNSS-дані, зібрані базовою станцією, зазвичай у форматі RINEX. Базовий файл RINEX містить точні вимірювання супутникових сигналів, положення та інформацію про час. Файл зазвичай збирається одночасно з польотом дрона або якомога ближче до часу польоту. Базовий файл RINEX використовується як еталон для корекції необроблених GNSS-даних, зібраних дроном під час польоту.
- Навігаційний файл: містить інформацію про положення та орбіту супутників GNSS, які використовуються для картографічного проєкту. Навігаційний файл використовується програмним забезпеченням PPK для обчислення точної інформації про місцезнаходження для кожного зображення, отриманого під час польоту дрона. Навігаційний файл можна отримати з різних джерел, включаючи державні установи, наприклад, Національна геодезична служба США (NGS) або онлайн-сервіси, такі як Міжнародна служба GNSS (IGS).
У цьому розділі інструкції використовується NGS CORS для отримання цих GNSS-файлів.
Щоб зібрати довідкові дані CORS за допомогою сервісу UFCORS (User Friendly CORS) Національного управління океанічних і атмосферних досліджень NOAA (National Oceanic and Atmospheric Administration), виконайте такі кроки:
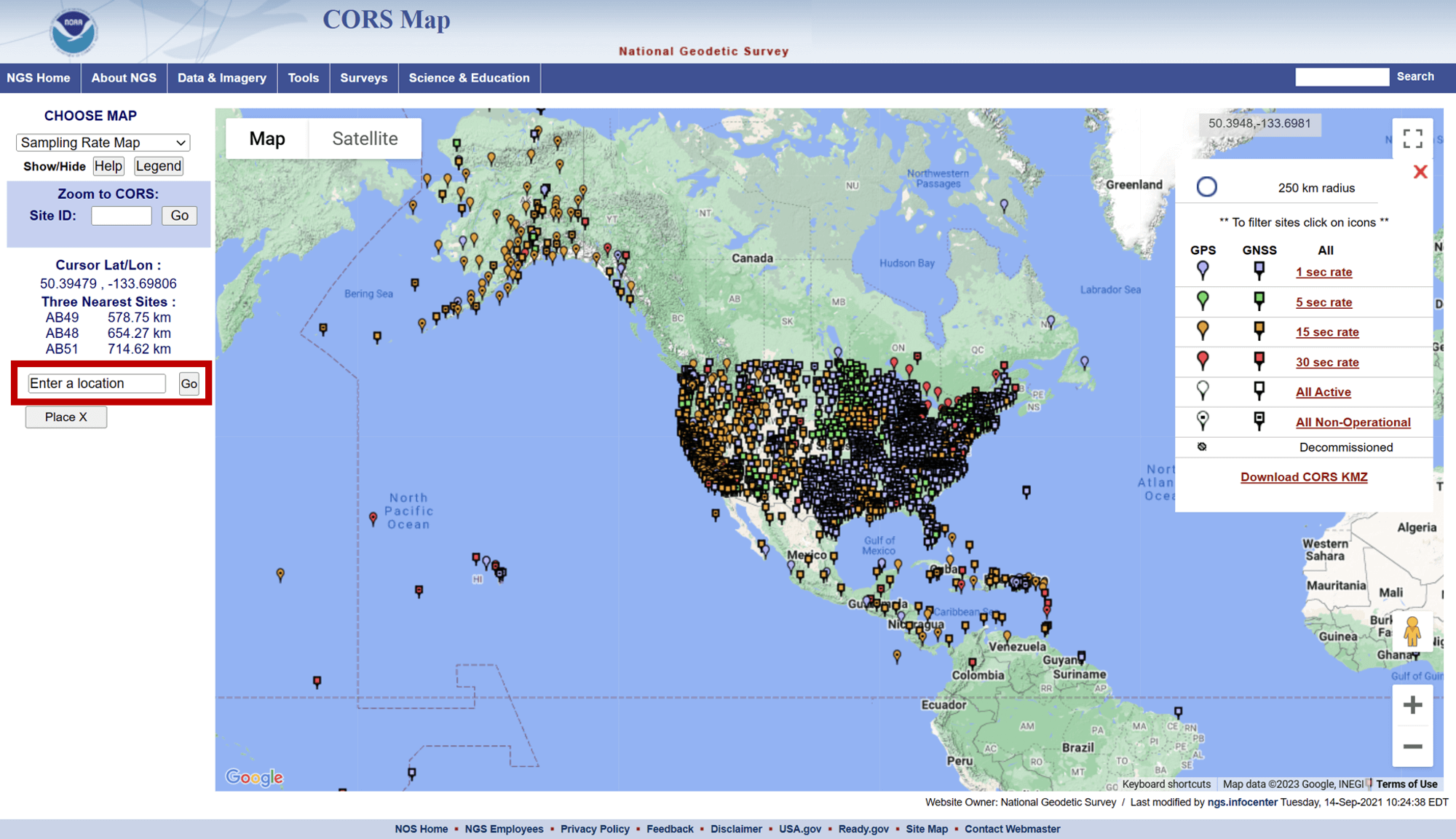
1. Перейдіть на веб-сайт NCN і виберіть на сторінці NCN Map.
2. Введіть адресу польоту дрона в поле пошуку зліва і натисніть кнопку «Почати»:
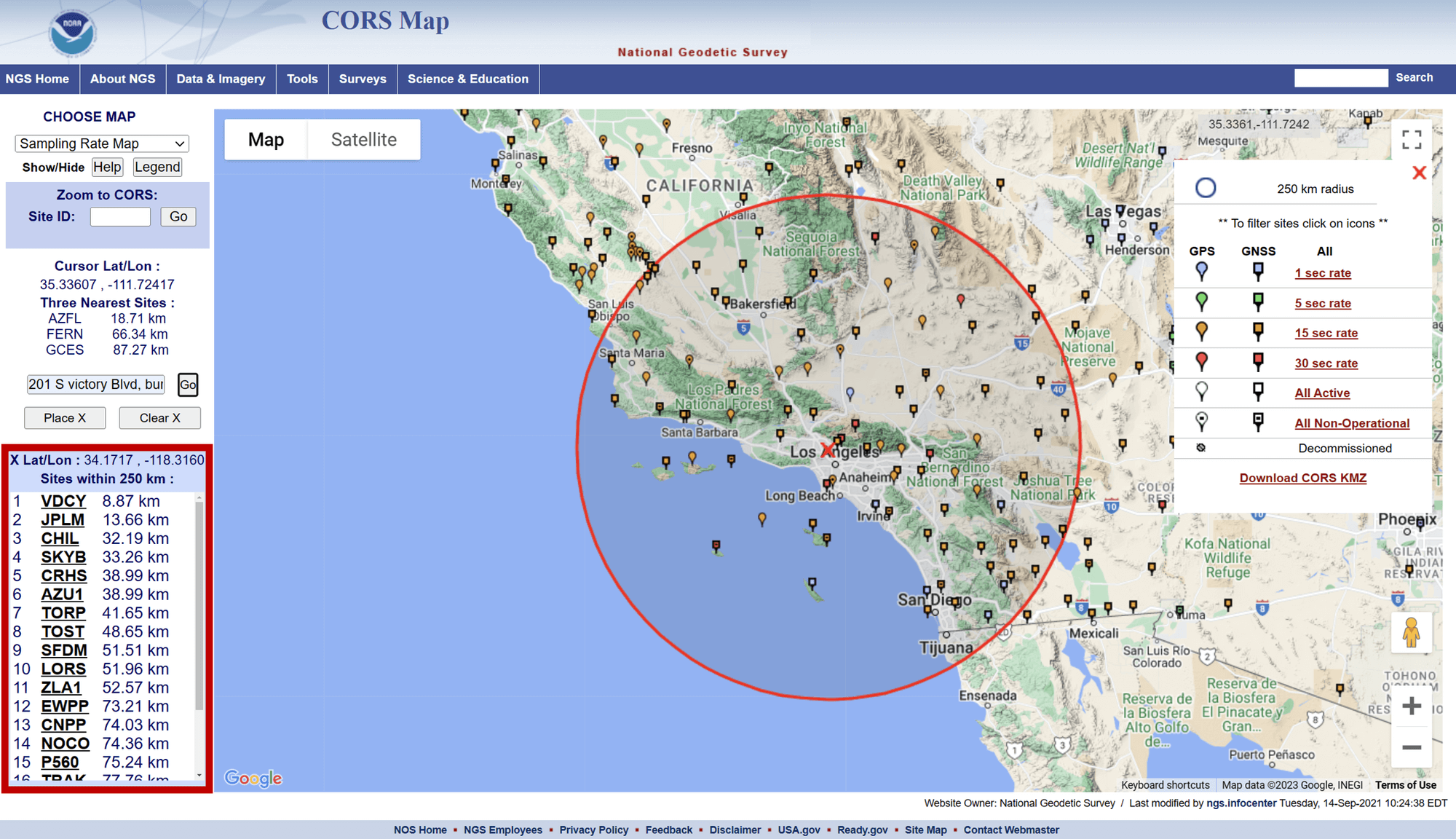
3. Виберіть ділянку з найкоротшою базовою лінією і запишіть її назву. Базова лінія — це відстань між базовою станцією GNSS і дроном. Коротша базова відстань, як правило, забезпечує вищу точність результатів PPK, оскільки зменшує ймовірність помилок, спричинених атмосферними умовами та іншими факторами довкілля. Базова відстань між майданчиком CORS і дроном може впливати на якість вихідних даних, що використовуються для процесу PPK. Більша базова відстань може призвести до збільшення кількості помилок через атмосферні та інші фактори довкілля, що може спричинити менш точний результат PPK. Тому рекомендується, щоб відстань до базової лінії була якомога коротшою, але водночас покривала площу картографування. Не рекомендується використовувати ділянки з базовою відстанню понад 30 км.
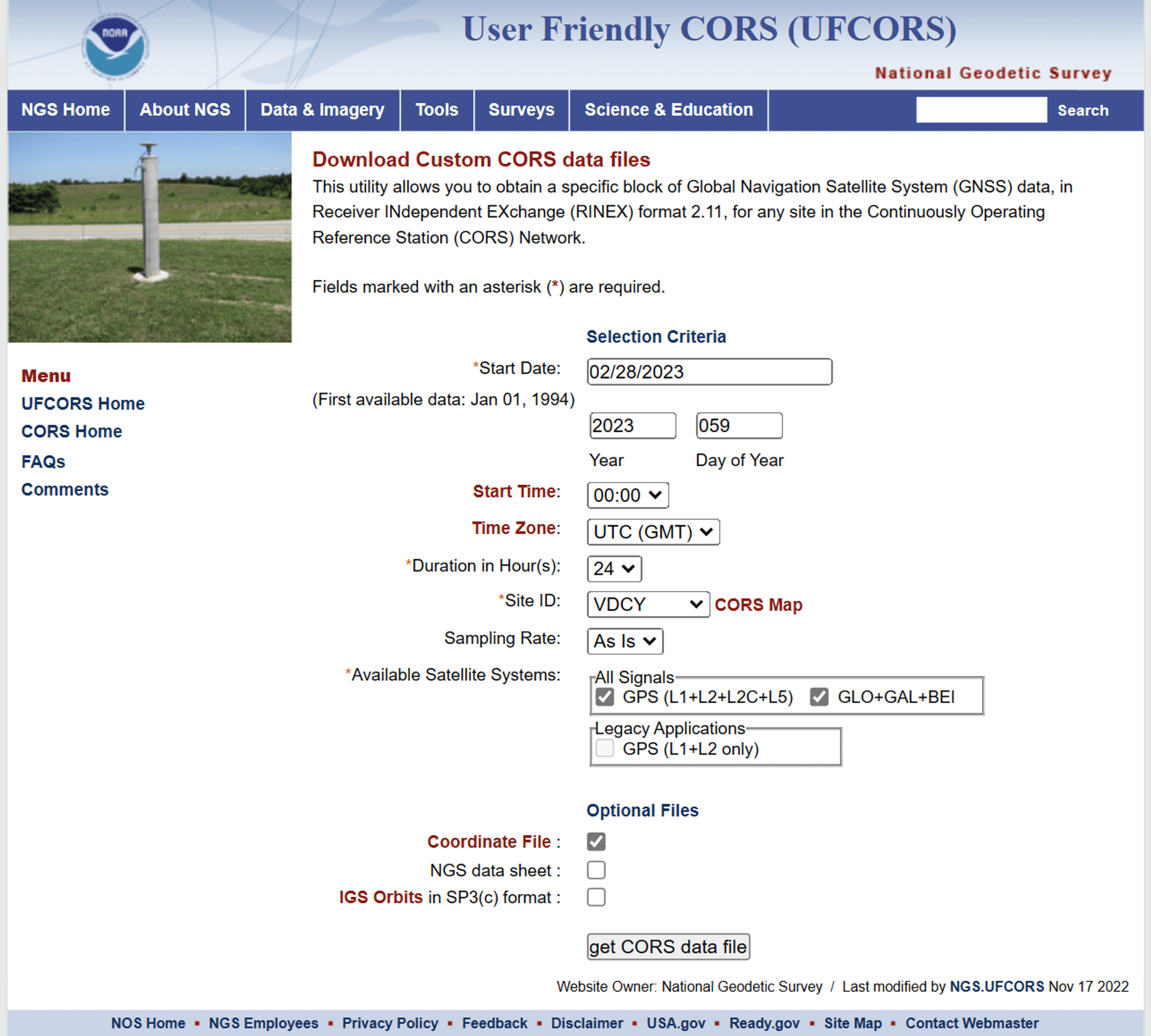
4. Перейдіть на веб-сайт UFCORS і виберіть діапазон дат для даних, які Ви хочете отримати. Виберіть «Отримати файл даних CORS». Дані будуть завантажені у форматі стисненого файлу (наприклад, .zip). Важливо переконатися, що дані CORS були зібрані одночасно з даними знімків із дрона, щоб забезпечити точну обробку PPK. Також слід ретельно оцінити якість даних CORS, щоб переконатися, що вони відповідають необхідним стандартам точності для картографічного проєкту. Належне планування та виконання польоту дрона і збір даних CORS мають важливе значення для забезпечення точної обробки PPK і отримання високоякісних результатів картографування.
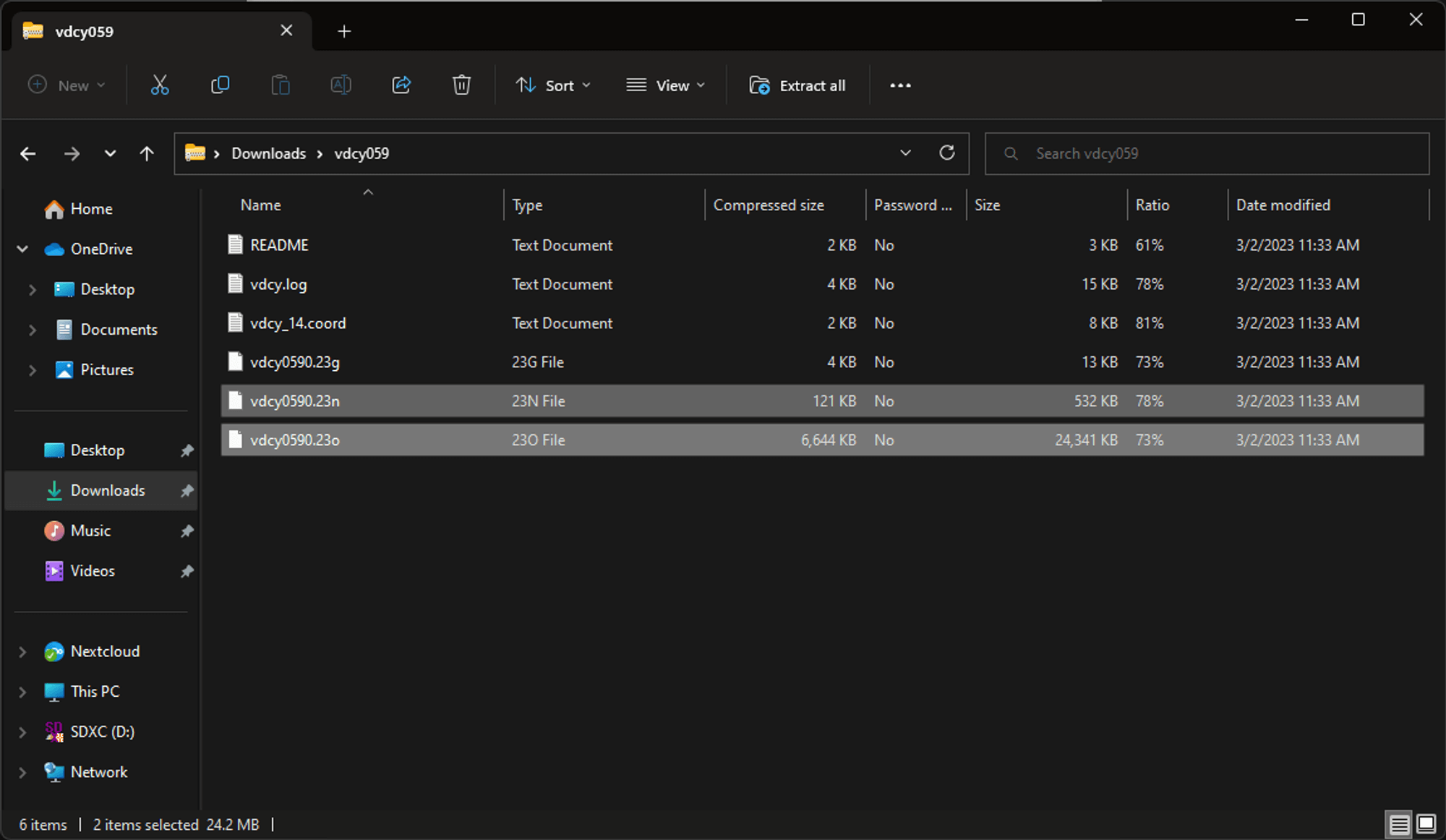
5. Відкрийте завантажений zip-файл і переконайтеся, що він містить наступні два файли: xxx.xxo (базовий файл RINEX) і xxx.xxn (файл навігації).
Якщо поблизу місця роботи дрона немає базової станції NGS CORS, то для отримання даних базової станції для обробки PPK підійде мобільна станція DJI D-RTK 2. Щоб скористатися нею, просто встановіть базову станцію над відомою точкою з координатами WGS84 і висотою еліпсоїда в метрах. Потім змістіть положення базової станції на основі 3D координат відомої точки в застосунку Pilot 2.
Обов'язково спочатку налаштуйте D-RTK 2 на місці й зачекайте кілька хвилин до й після польоту, щоб охопити всю тривалість польоту. Також уникайте переміщення або нахилу базової станції D-RTK 2 під час польоту, оскільки це може призвести до переривання запису даних через зміну орієнтації. Після завершення польоту підключіть базову станцію до комп'ютера за допомогою кабелю USB-C і експортуйте записані після польоту файли RTCM (Radio Technical Commission for Maritime) у форматі .dat. Використовуючи мобільну станцію DJI D-RTK 2, Ви можете уникнути необхідності в додатковому обладнанні та абонентській платі, які можуть знадобитися для зв'язку в режимі реального часу. Це робить процес PPK більш економічно ефективним і пропонує більшу гнучкість для збору даних, особливо в районах з обмеженим стільниковим покриттям або без нього.
Вирівнювання даних та обробка PPK
У цьому розділі описано покроковий процес застосування даних дрона з файлами GNSS коптера, зібраними з NGS CORS, сторонніх базових станцій або мобільної станції DJI D-RTK 2, щоб розпочати процес PPK. Використовувалися RedCatch REDToolBox як приклад.
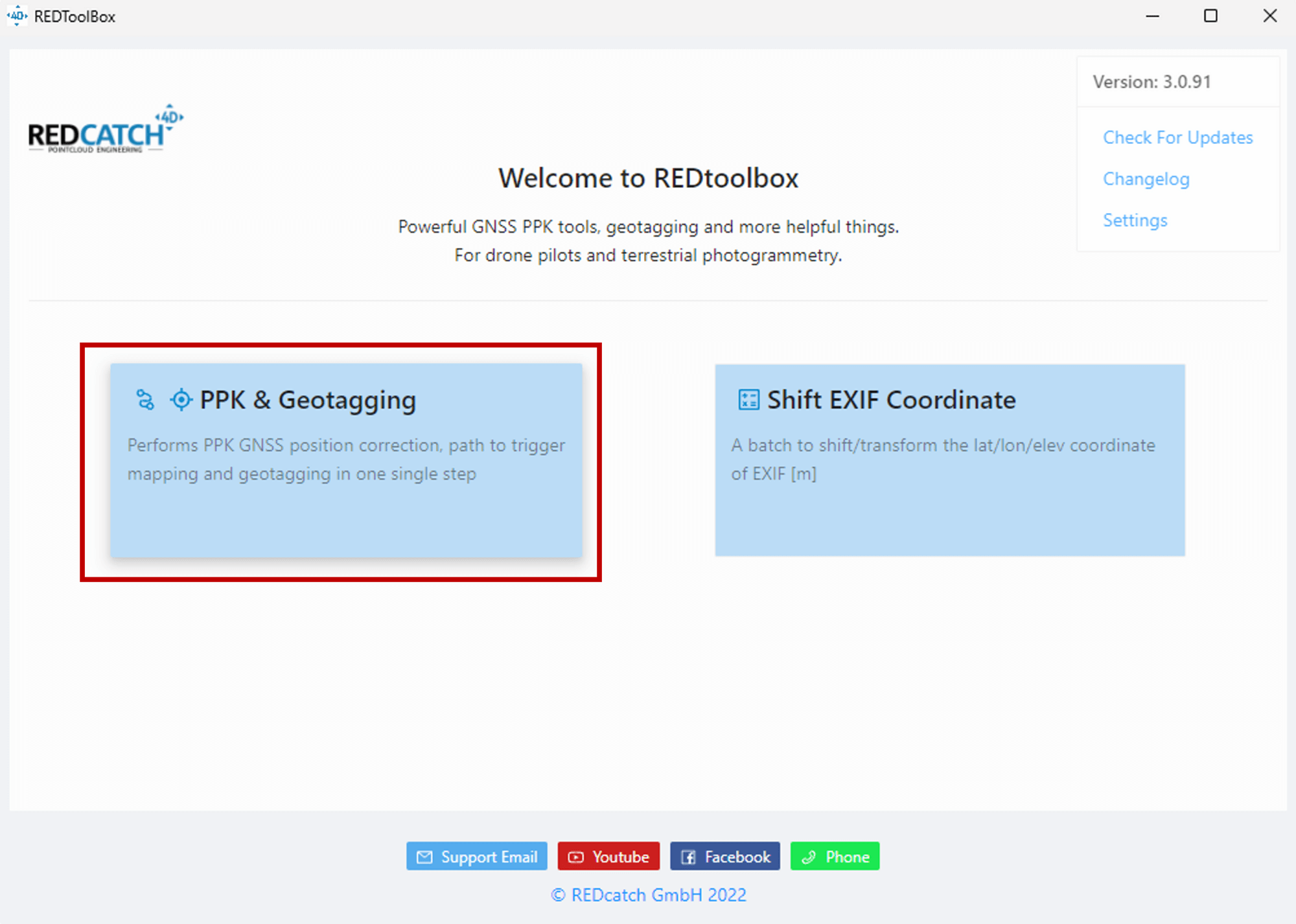
1. Для початку Вам потрібно відкрити RedCatch REDToolBox і вибрати опцію PPK & Geotagging.
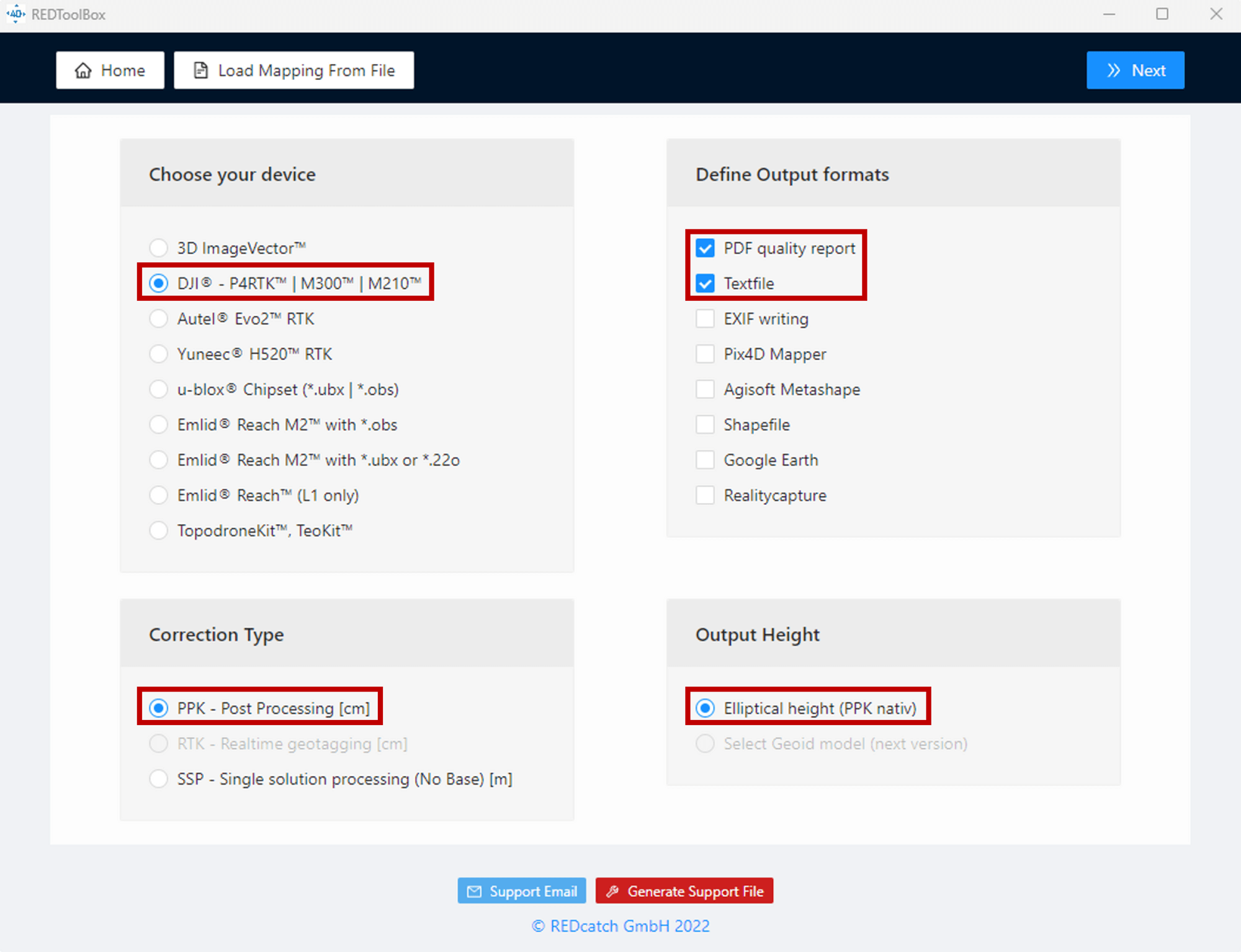
2. Опція запропонує вибрати DJI як пристрій і вибрати PDF звіт про якість і текстовий файл як вихідні формати. Потім виберіть опцію «PPK як тип корекції» та «Еліптичну висоту» (PPK native) як висоту виводу. Після цього натисніть «Далі».
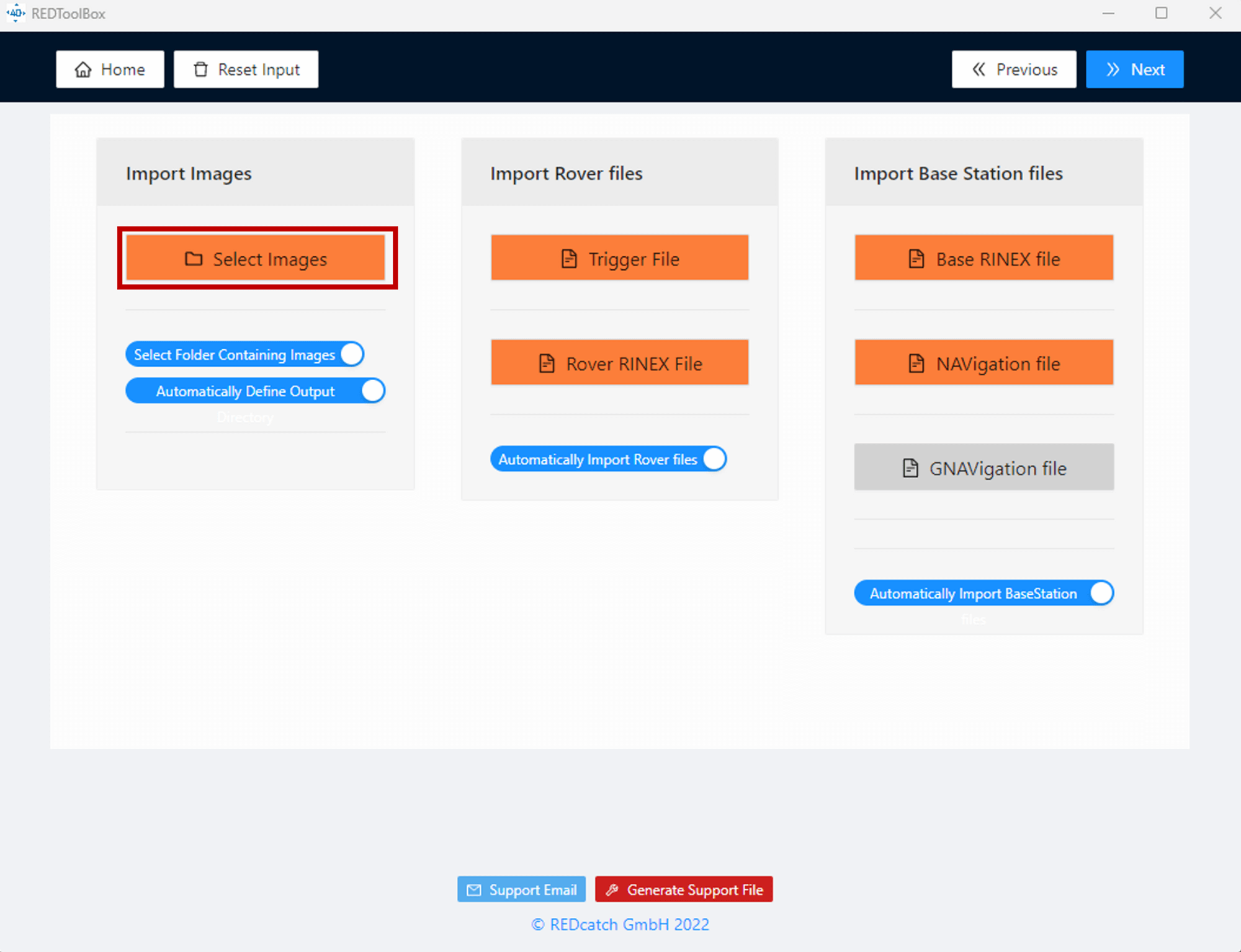
3. Щоб імпортувати зображення, перейдіть до розділу «Імпорт зображень» і «Вибрати зображення», щоб вказати папку з необробленими зображеннями. Це гарантує, що зображення будуть правильно імпортовані й можуть бути використані в процесі PPK.
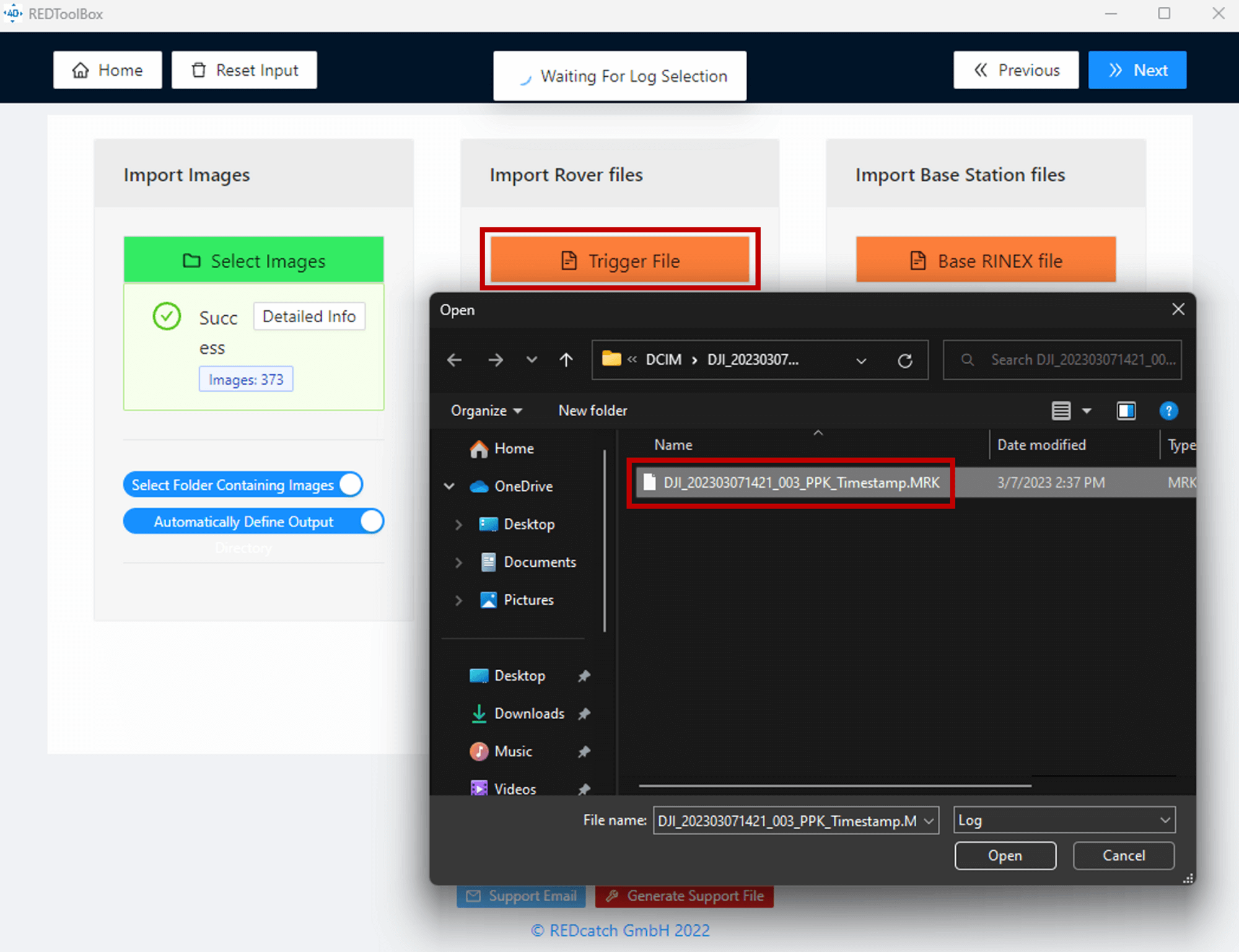
4. Далі Вам потрібно вибрати розділ «Імпортувати файли ровера» (Import Rover files) і вибрати опцію «Файл тригера». Тут Ви можете імпортувати файл MRK із назвою XXX_Timestamp.MRK до папки з необробленим зображенням. Цей файл містить важливу інформацію про мітки часу зображення, які будуть використані у процесі PPK.
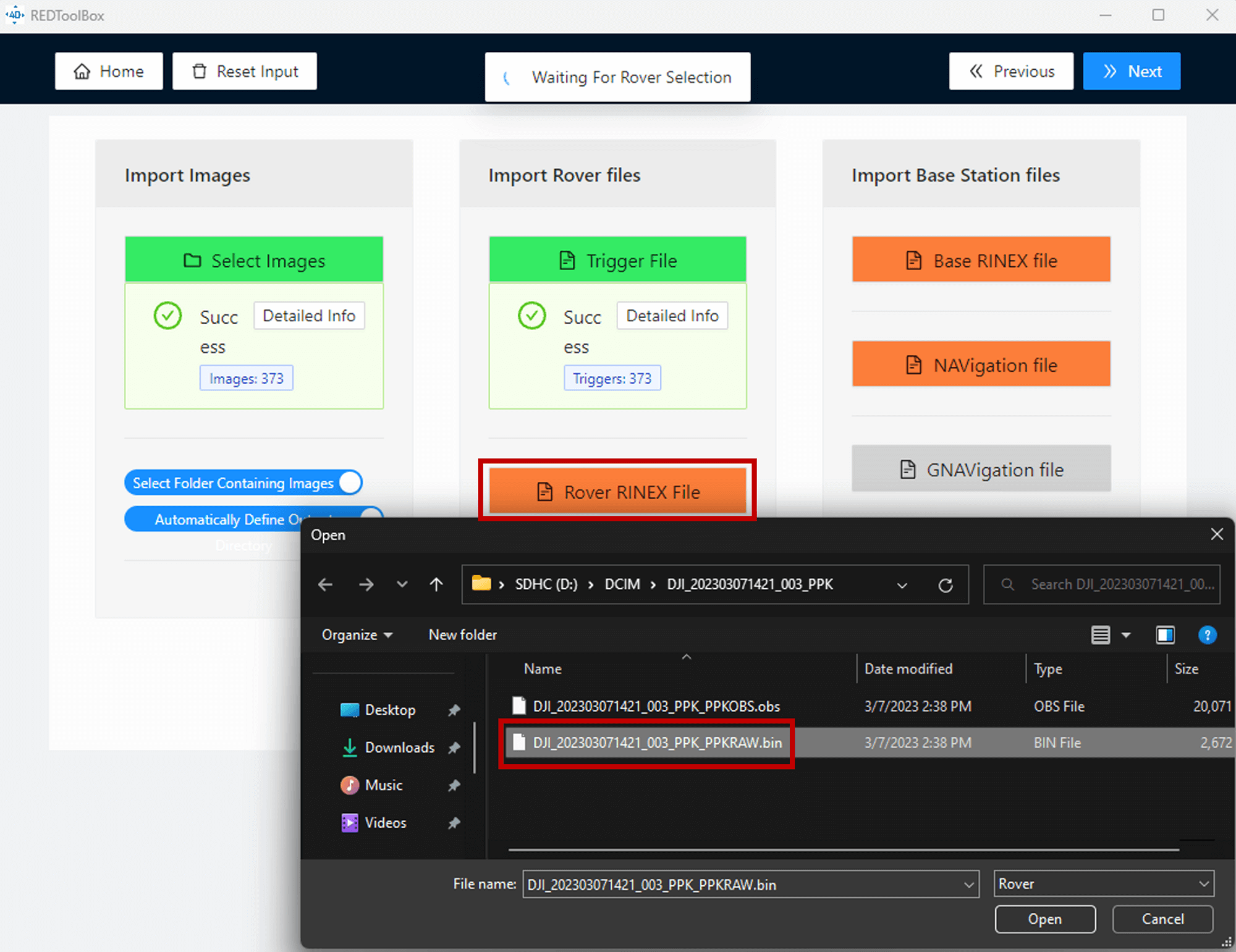
5. Після імпорту файлу MRK Вам потрібно буде знову вибрати опцію Rover RINEX file та імпортувати файл RINEX з ім'ям XXX_PPKRAW.bin у папку з необробленим зображенням. Переконайтеся, що Ви обрали правильний файл, оскільки це має вирішальне значення для успіху процесу PPK.
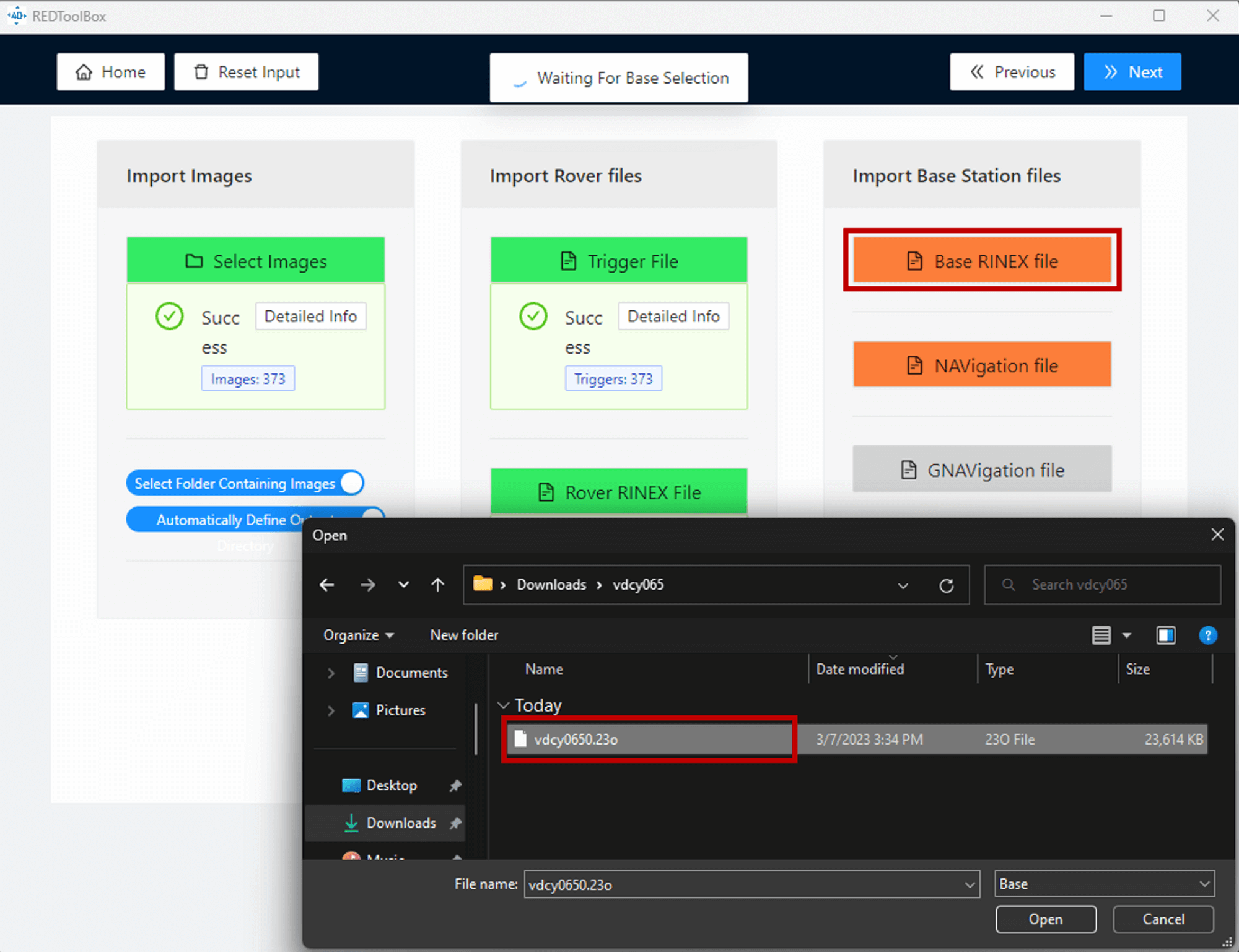
6. Перейдіть до розділу «Імпорт файлів базової станції» (Import Base Station Files), виберіть опцію Base RINEX file та імпортуйте файл RINEX із назвою XXX.xxo з папки необроблених супутникових даних, завантаженої з сайту UFCORS. Якщо використовуєте мобільну станцію DJI D-RTK 2 для обробки PPK, виберіть та імпортуйте файл RTCM у форматі .dat у цій опції. Якщо Вам потрібно об'єднати декілька файлів RTCM у форматі .dat в один файл, скористайтеся наступним інструментом і запустіть його в тій самій директорії, що й декілька файлів RTCM: merge_bin.bat.
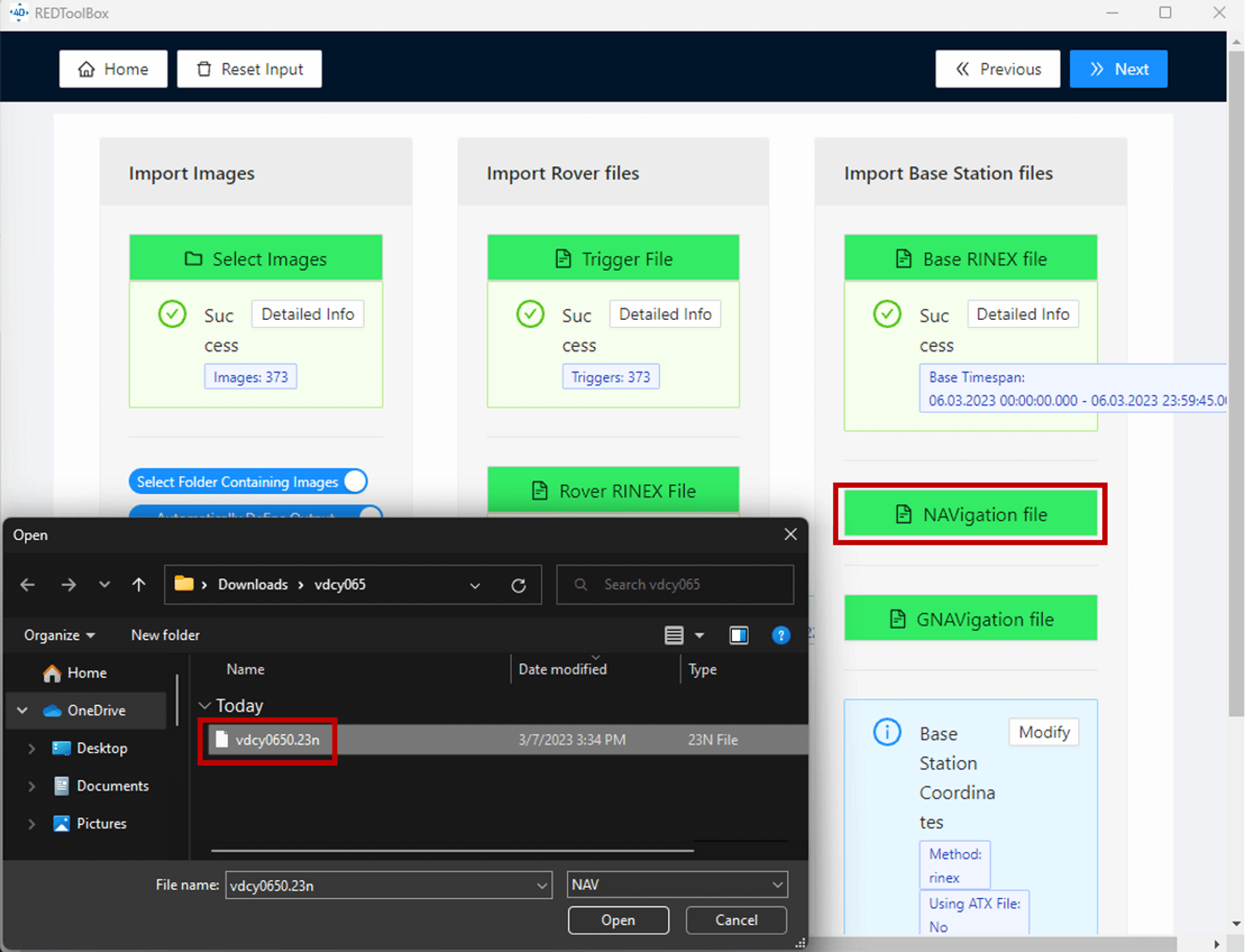
7. Після того, як Ви обрали файл XXX.xxo з папки з необробленими супутниковими даними, файли навігації мають бути імпортовані автоматично. Якщо цього не сталося, ці два файли можна знайти в папці з необробленими супутниковими даними, завантаженими з сайту UFCORS.
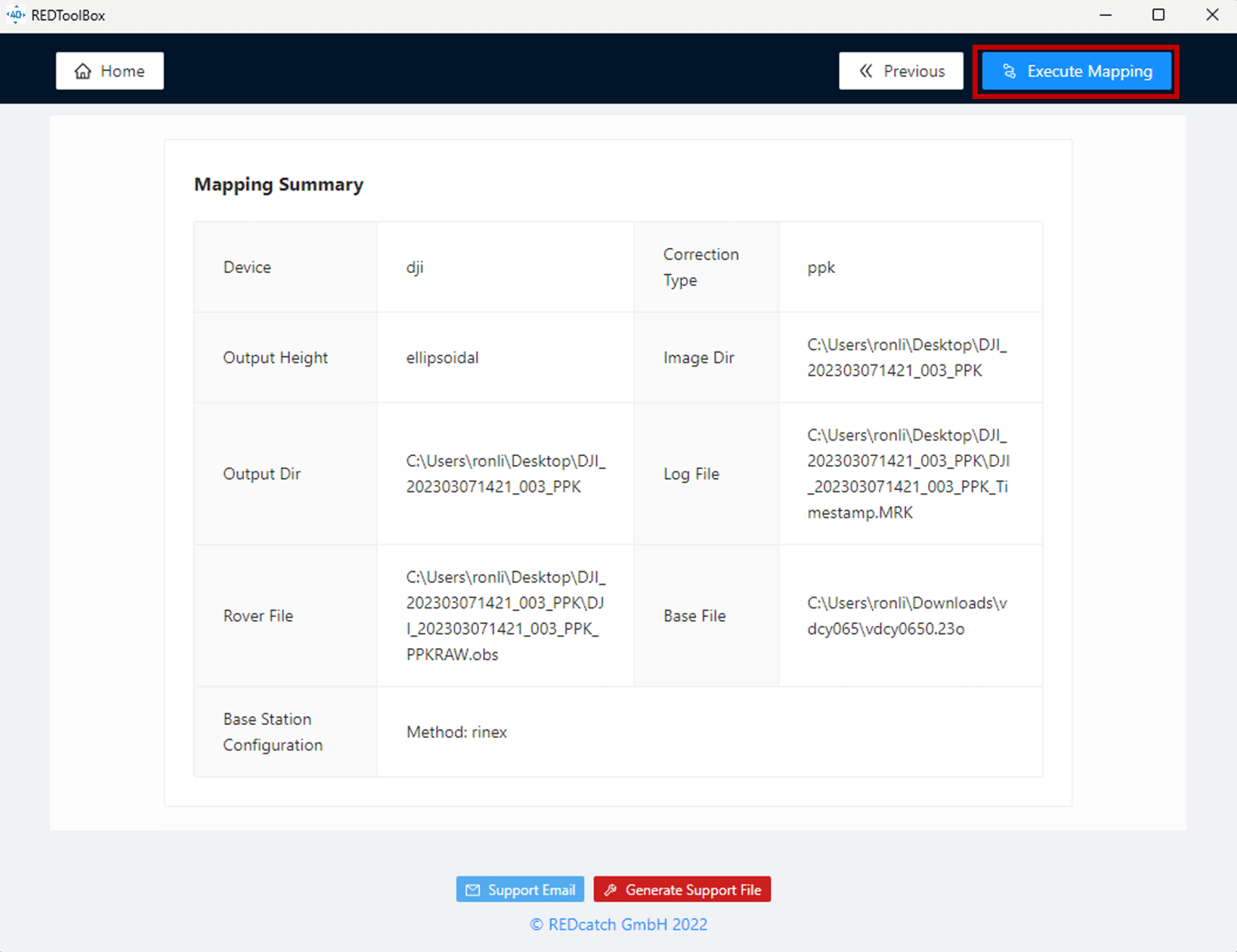
8. Нарешті, перегляньте підсумок мапування й виберіть Execute Mapping (Виконати мапування), щоб розпочати процес PPK.
9. Після завершення процесу перевірте PDF quality report (Звіт про якість PDF) і textfile (текстовий файл), а потім виберіть опцію Generate Output From Mapping (Згенерувати вихідні дані з картографування).
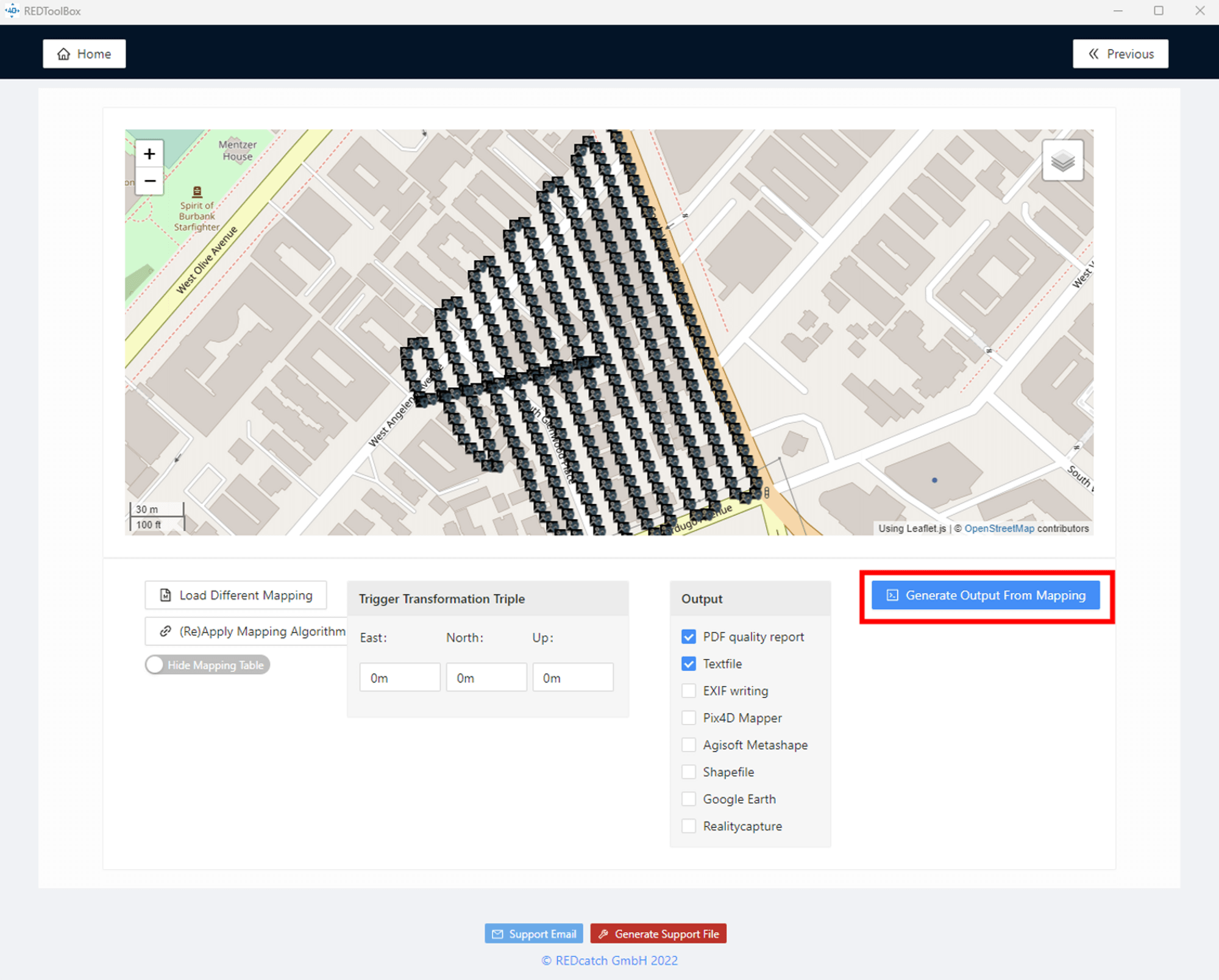
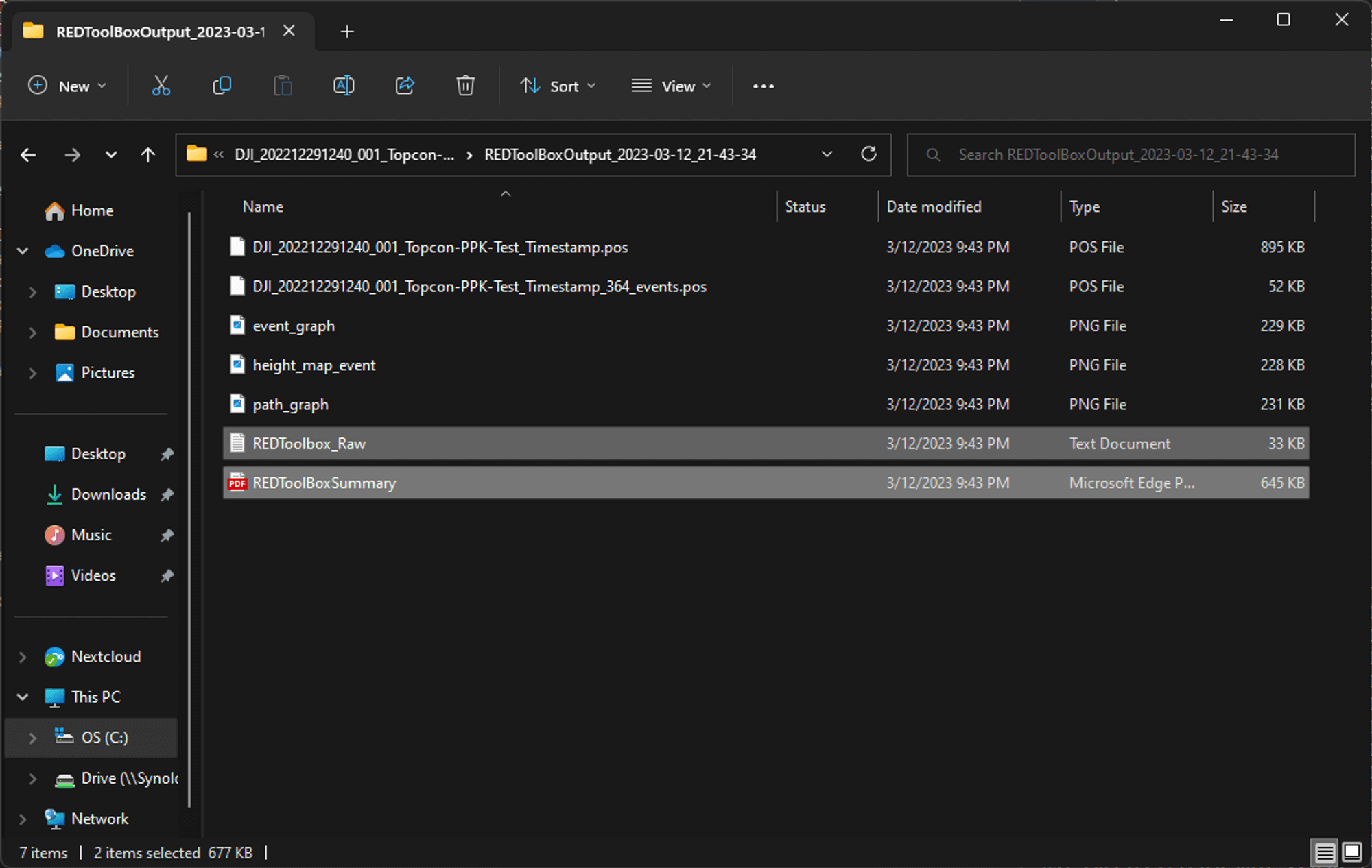
10. Щоб переконатися, що виправлені POS-дані (REDToolbox_Raw.txt) і зведений звіт (REDToolBoxSummary.pdf) експортовано, відкрийте папку вихідних даних. Пізніше використовуватимемо перший файл мітки часу з виправленими POS-даними зображення для обробки фотограмметрії.
Перезапис POS-даних
POS-дані (позиція та орієнтація) знімків дрона — це інформація про місцезнаходження, відношення та траєкторію руху дрона під час зйомки. Ці дані зазвичай отримують за допомогою GPS та інших датчиків на борту дрона й використовують для точної географічної прив'язки зображень і створення 3D-моделі або карти досліджуваної території за допомогою методів фотограмметрії.
У процесі фотограмметрії дані POS зображення з дрона використовуються в аеротріангуляції для точного визначення положення й орієнтації кожного зображення в тривимірному просторі. Процес аеротріангуляції передбачає обчислення відносного положення та орієнтації зображень на основі їх перекриття та відповідних характеристик зображень. Для обчислення орієнтації кожного знімка в тривимірному просторі використовуються дані POS-зображень із дрона, і ця інформація використовується для створення розрідженої хмари точок, яка представляє досліджувану територію.
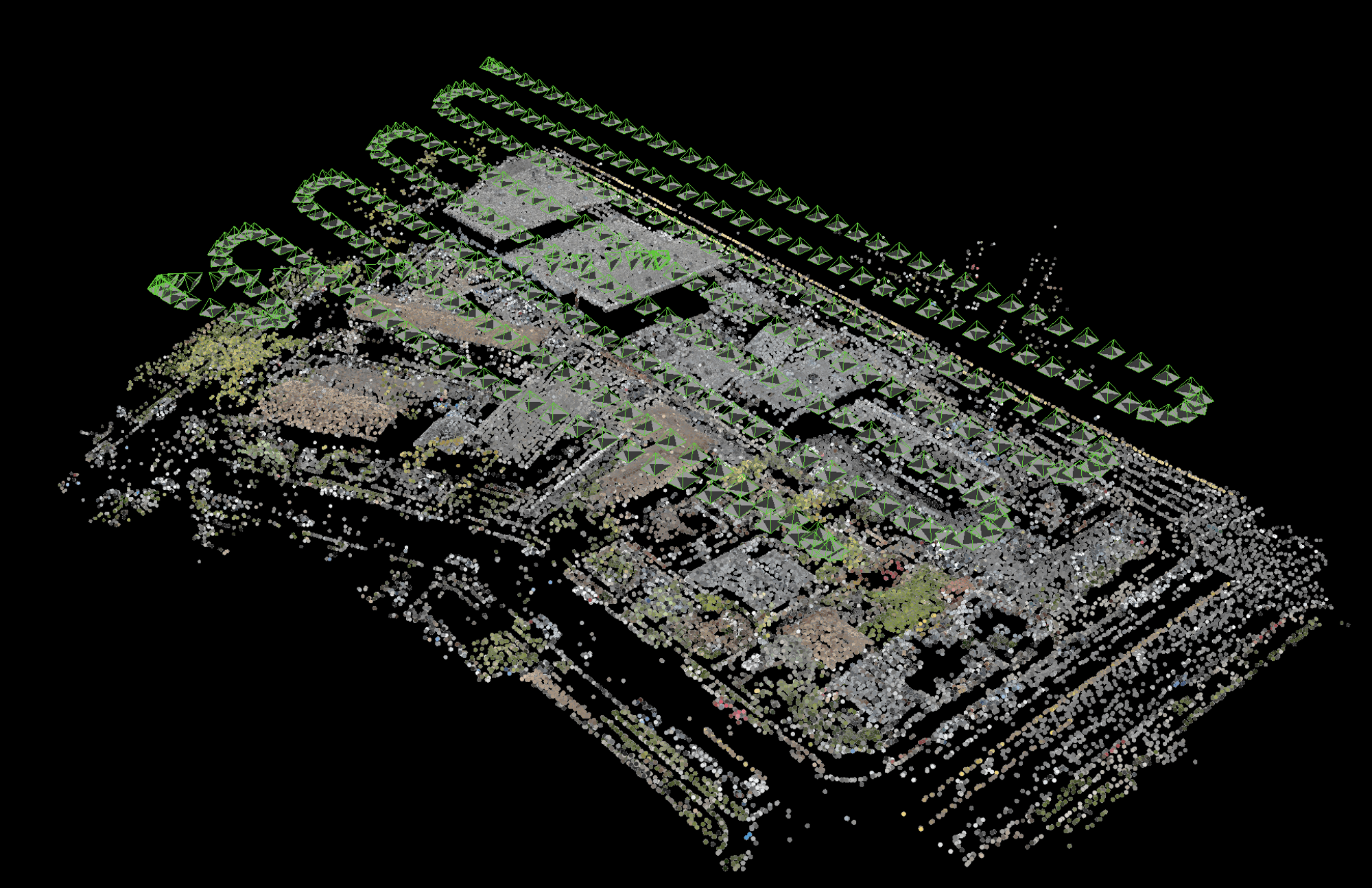
Аеротріангуляційна модель, згенерована на основі зображення POS
Якщо дані про місцезнаходження знімків із дрона є неточними або неакуратними, результати фотограмметрії також будуть менш точними. Будь-які помилки в точкових даних знімків можуть призвести до помилок у процесі аеротріангуляції, що спричинить помилки в процесі коригування і, в кінцевому підсумку, призведе до менш точного результату.
Точність даних про місцезнаходження знімків, отриманих із дрона, впливає на загальну точність вихідних даних під час процесу PPK. Процес PPK коригує POS-дані знімків із дрона та будь-які помилки, спричинені дрейфом або шумом GPS та іншими помилками, пов'язаними з сенсором. Отримані в результаті PPK-коригування POS-дані потім використовуються для створення щільної хмари точок, яка представляє досліджувану територію, що потім може бути використана для створення 3D-моделей або мап. Тому важливо переконатися, що дані POS-зображень із дрона правильно визначені в програмному забезпеченні для фотограмметрії.
Ми будемо використовувати програмне забезпечення DJI Terra як приклад для застосування й перезапису POS-даних зображень. Будь ласка, виконайте наведені нижче кроки, щоб застосувати та перезаписати PPK-виправлені дані про місцезнаходження зображень у програмному забезпеченні Terra:
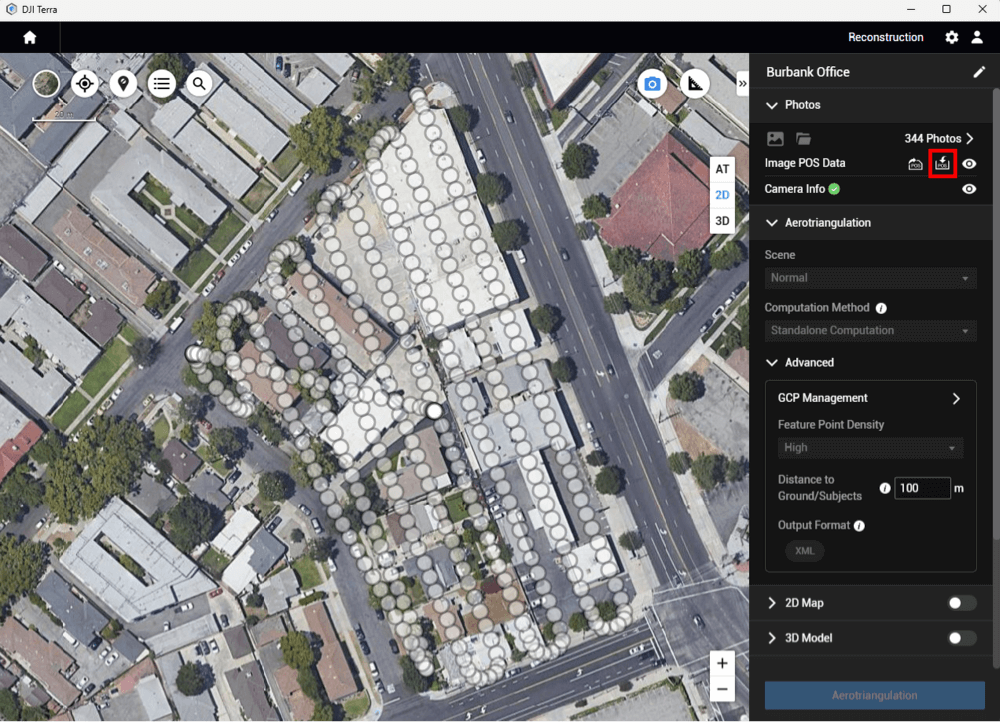
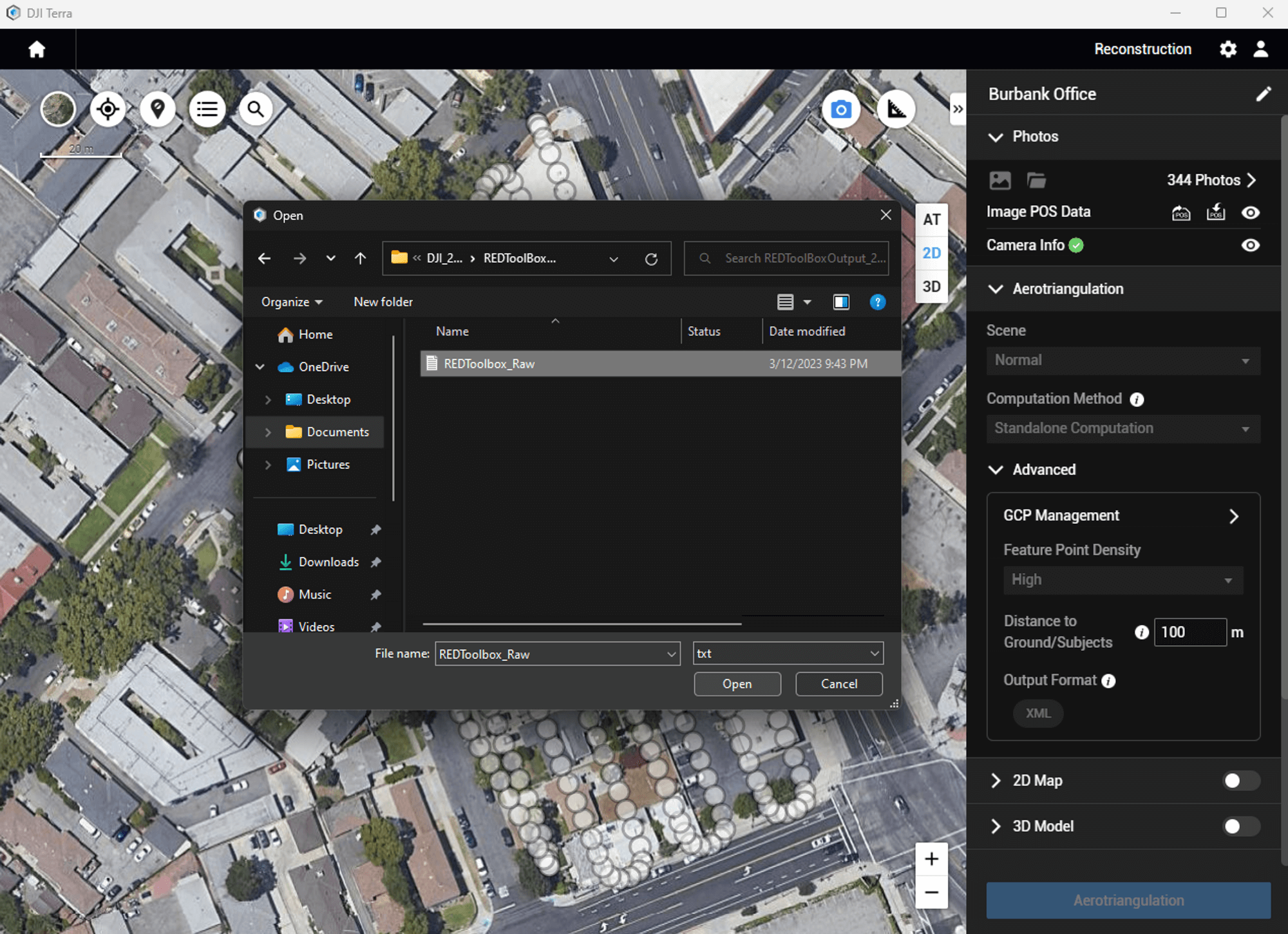
1. Відкрийте DJI Terra, на вкладці Reconstruction (Реконструкція) виберіть New Mission (Нова місія), а потім виберіть Visible Light (Видиме світло), щоб створити нову місію фотограмметричної реконструкції. Після імпорту всіх фотографій виберіть опцію Import POS Data, як показано нижче.
2. Не забудьте імпортувати оброблений POS-файл у текстовому форматі з попереднього розділу.
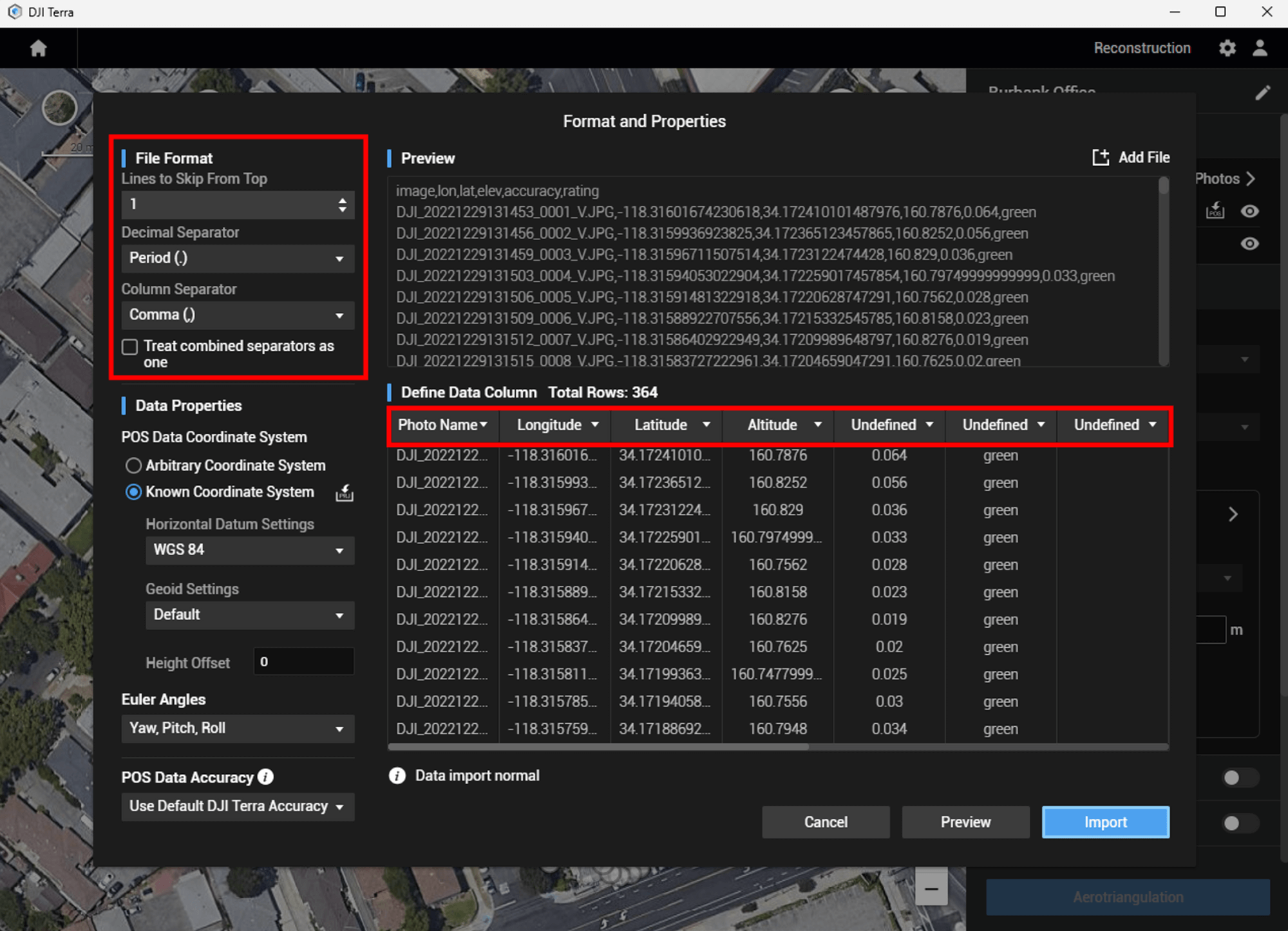
3. Після імпорту даних зображення POS-терміналу має автоматично з'явитися вікно Format and Properties (Формат і властивості). У цьому вікні налаштуйте стовпчик даних і визначте властивості стовпчика в розділі Define Data Column (Визначити стовпчик даних). Переконайтеся, що перший рядок таблиці містить POS-дані першого зображення, і за допомогою інструментів у розділі File Format (Формат файлу) визначте роздільники даних і перший рядок даних.
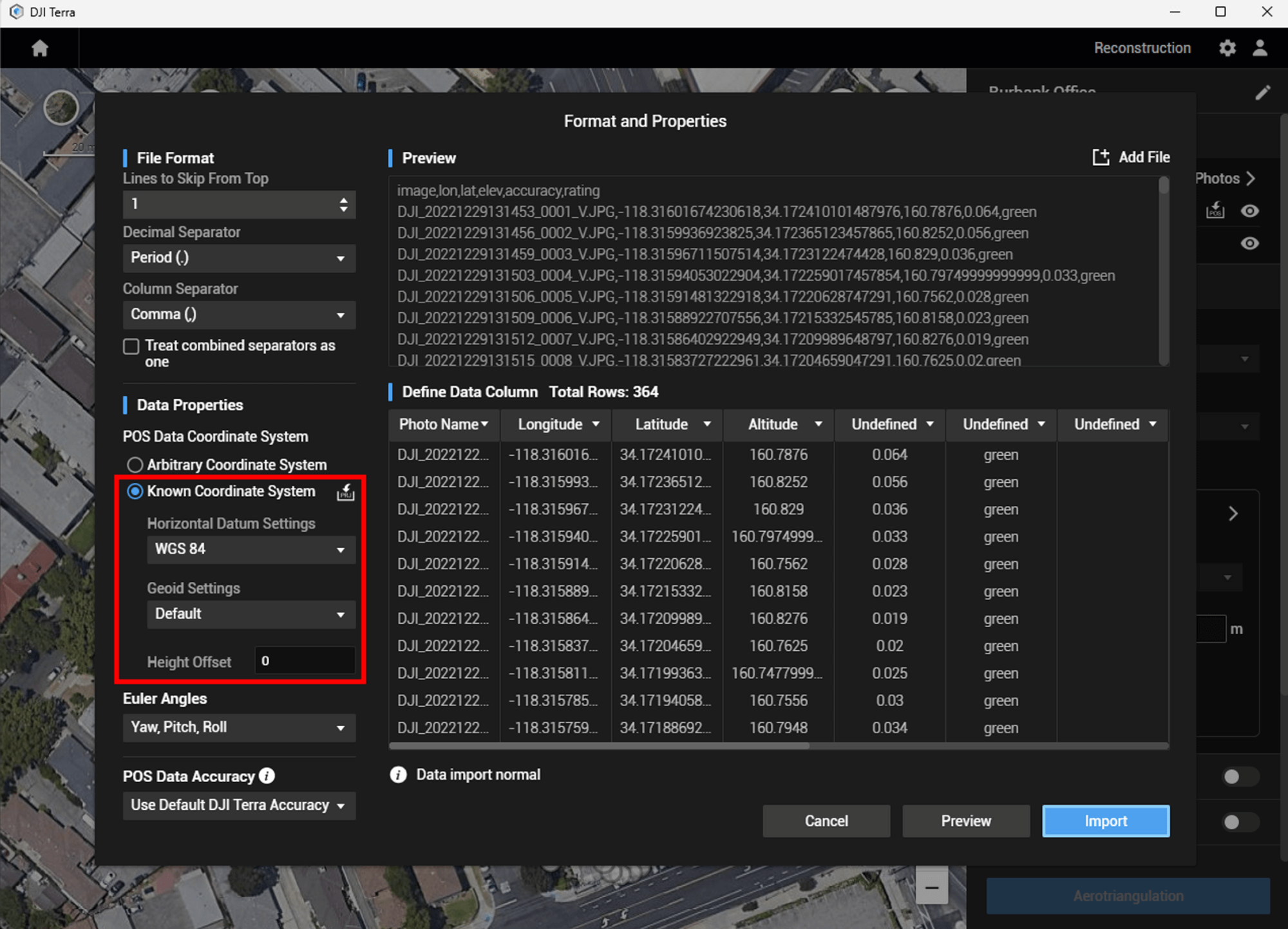
4. Щоб продовжити, виберіть опцію Known Coordinate System (Відома система координат) під системою координат POS-даних. Потім виберіть відповідні горизонтальні та вертикальні координати для імпортованих PPK-оброблених зображень POS-даних. Дуже важливо вибрати правильні координати як для горизонтальної, так і для вертикальної систем, щоб уникнути будь-яких зсувів вихідних даних. Якщо Ви не впевнені, яку систему координат вибрати, можете знайти систему координат оброблених PPK POS-даних у налаштуваннях програмного забезпечення PPK або у звіті про якість обробки PPK-даних. Зазвичай, горизонтальна система координат має бути у WGS84 (EPSG:4326), а вертикальна система — в еліпсоїдальній висоті (в метрах, яку можна встановити за замовчуванням в DJI Terra). Після того, як Ви визначили нові дані POS, натисніть Import (Імпортувати).
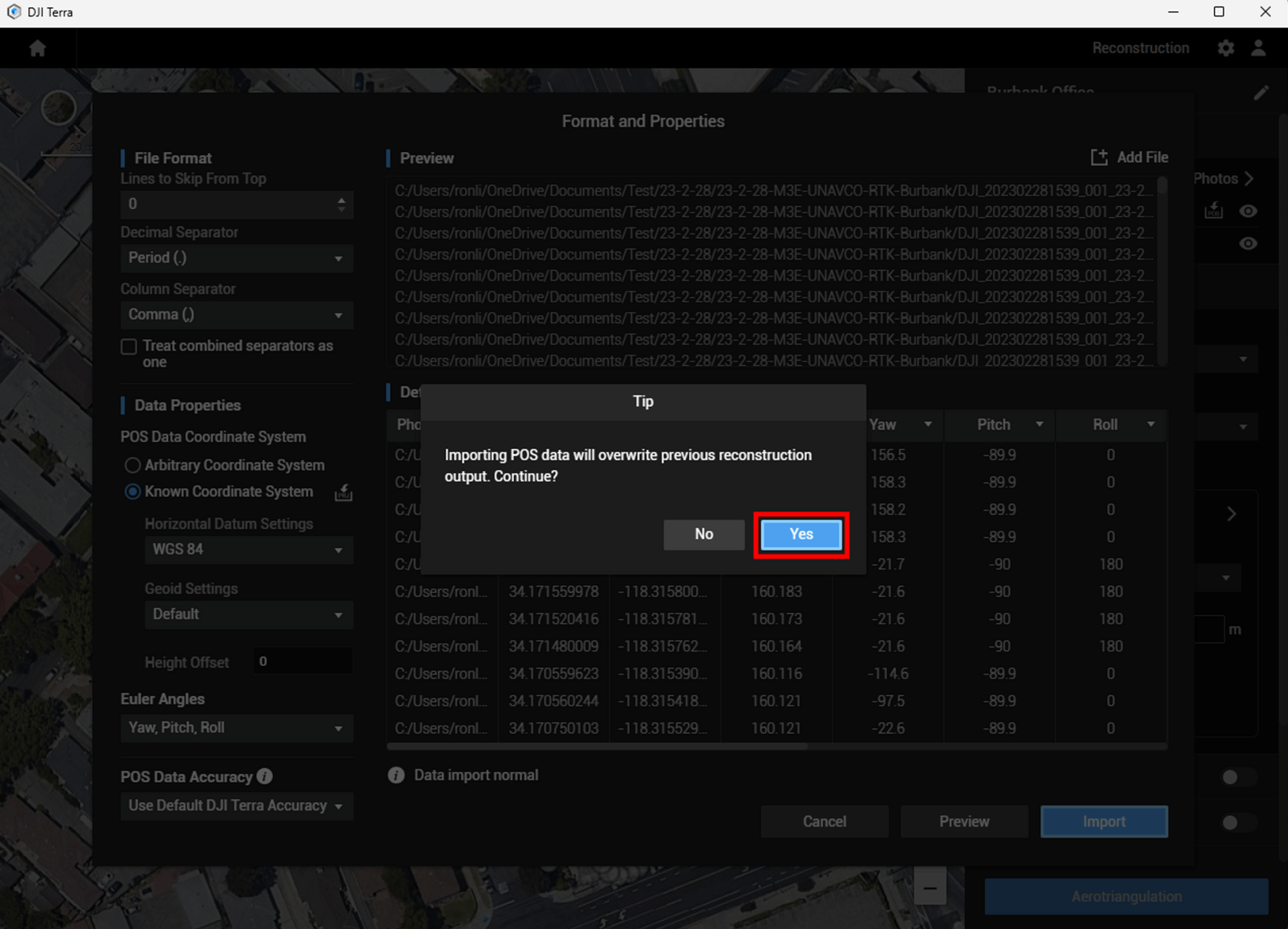
5. Щоб замінити старі POS-дані, вбудовані у фотографії, на PPK-виправлені POS-дані з txt-файлу, виберіть Yes (Так), щоб підтвердити дію в DJI Terra. Тепер POS-дані успішно перезаписані.
PPK забезпечує ефективне й точне рішення для отримання високоточних геопросторових даних для різноманітних застосувань. Використовуючи як GPS, так і методи постобробки, PPK дає змогу отримувати результати з сантиметровою точністю навіть у складних умовах. Дотримуючись наведеного вище робочого процесу PPK і використовуючи передові програмні та апаратні засоби, Ви можете забезпечити найвищий рівень точності і достовірності Ваших даних, що в кінцевому підсумку забезпечить краще ухвалення рішень і поліпшення результатів.







































